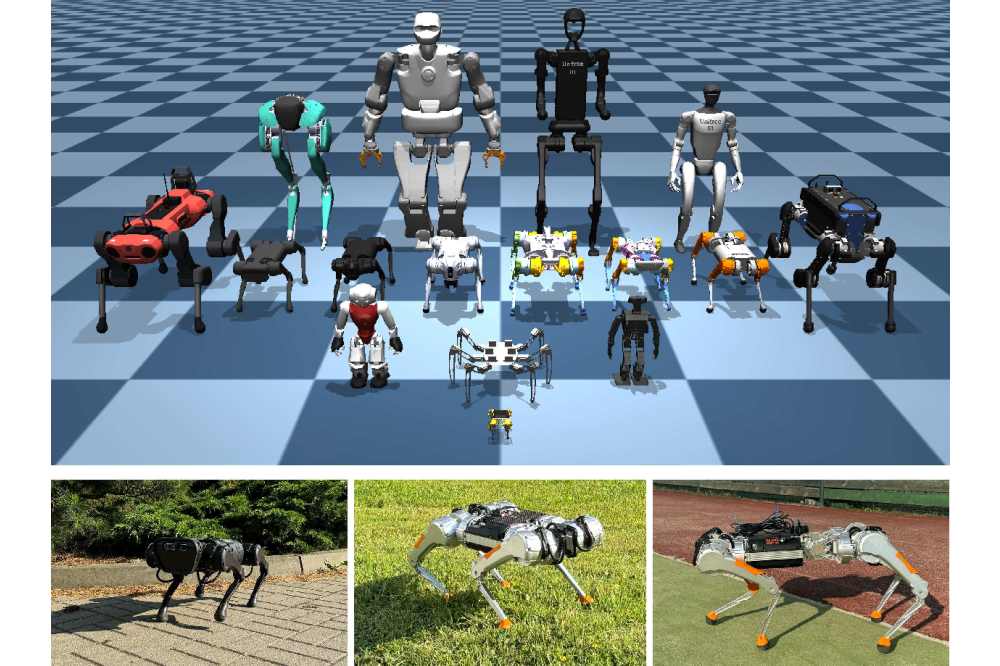
End-to-end Learning for Multi-Embodiement Locomotion
The rapid development of robotics has enabled legged robots capable of performing highly dynamic tasks such as walking ...
Engineering Sciences
Computer Science
The rapid development of robotics has enabled legged robots capable of performing highly dynamic tasks such as walking ...

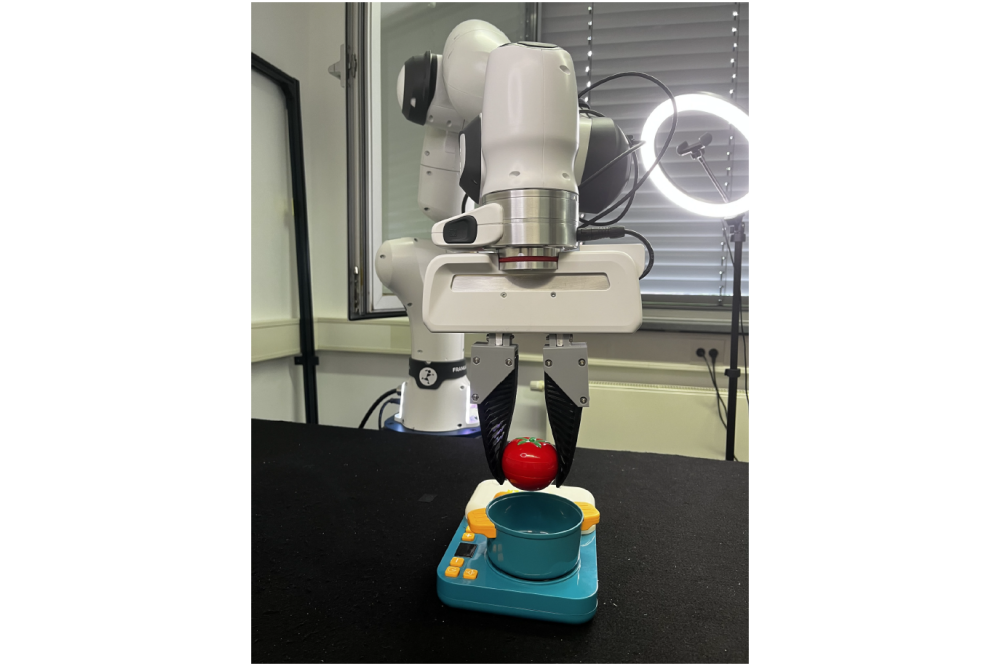
Up-to-date contact-rich manipulation tasks remain one of the grand challenges of robotics. Equipping robots with a sense ...
Up-to-date contact-rich manipulation tasks remain one of the grand challenges of robotics. Equipping robots with a sense ...
General-purpose intelligent robots are expected to simultaneously handle multiple tasks while interpreting various ...
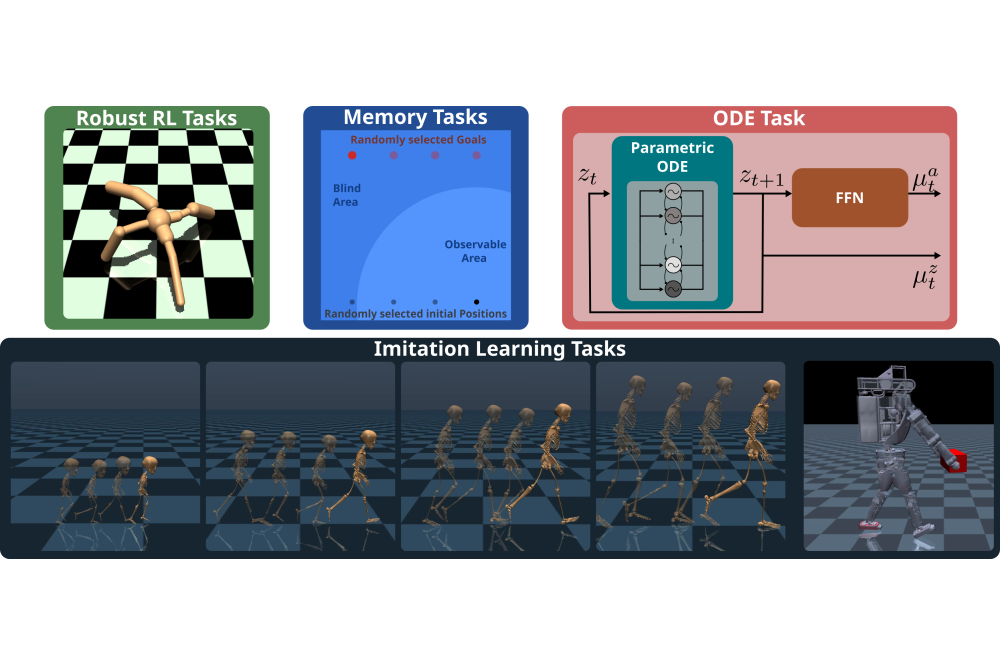
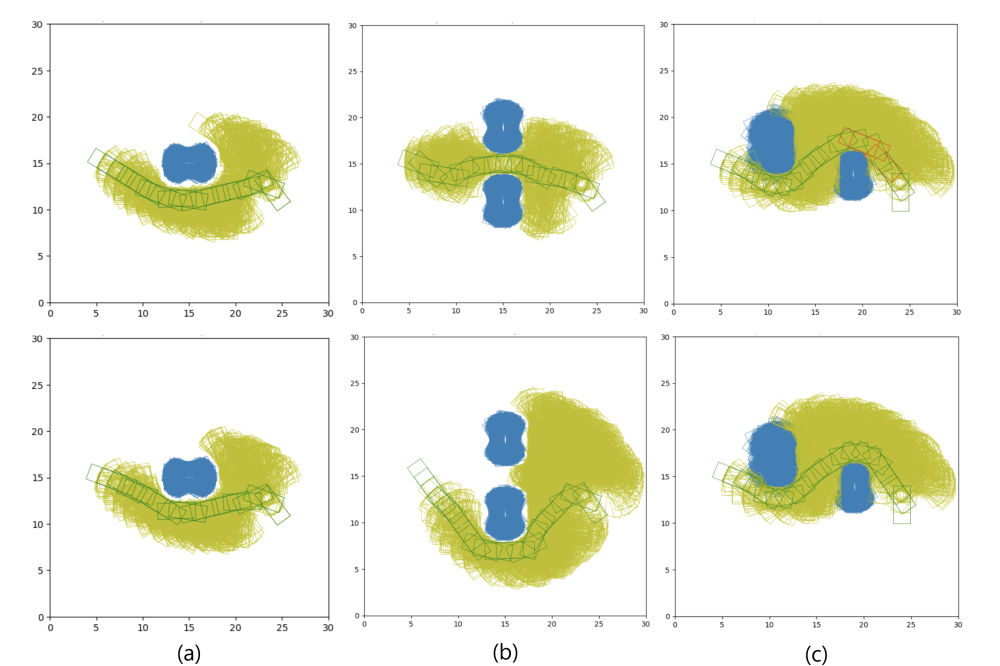
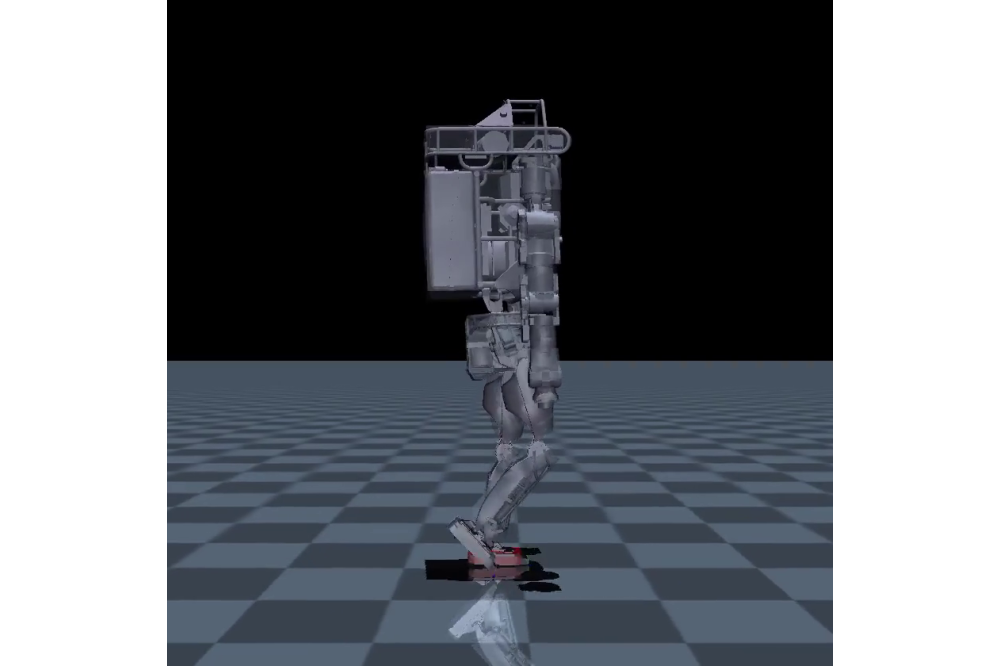
Understanding the underlying reward mechanisms of human locomotion and transferring this knowledge to humanoid robots is ...
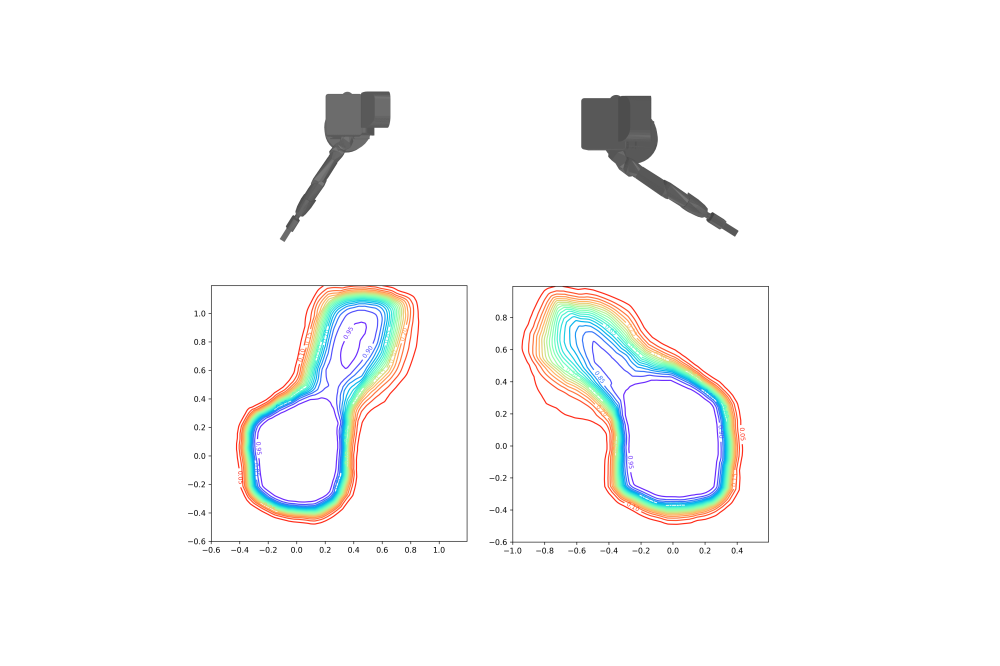
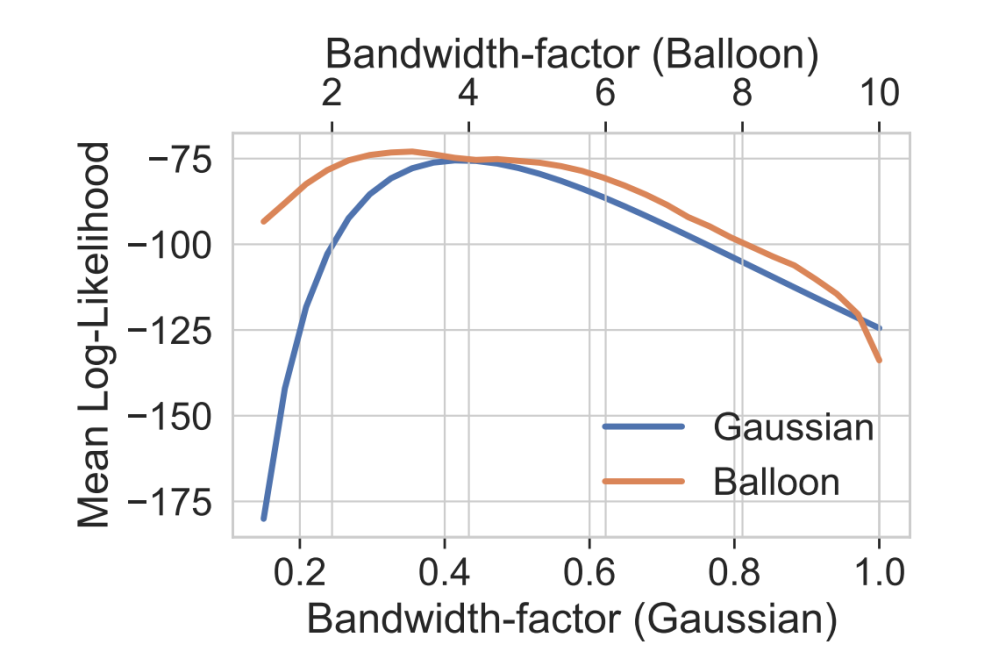
Variational inference with Gaussian mixture models (GMMs) can be used to learn highly tractable approximations of ...
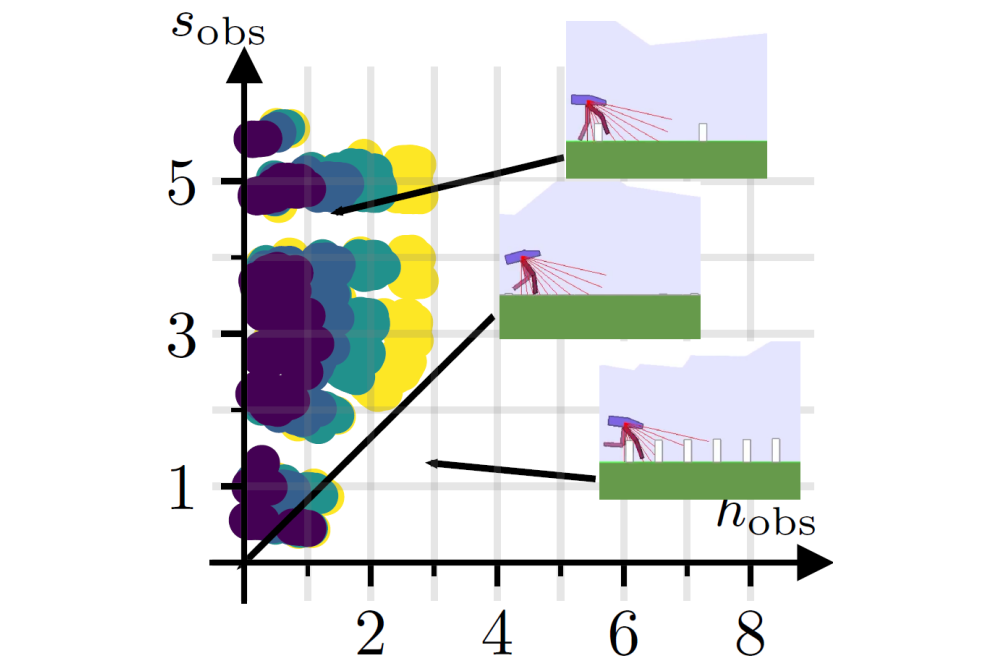
In robotic applications such as autonomous driving and whole-body control, ensuring safety is of utmost importance ...

Robotics platforms can massively benefit from novel Deep Reinforcement Learning approaches. However, robotics have ...
Many problems in machine learning involve inference from intractable distributions. For example, when learning latent ...
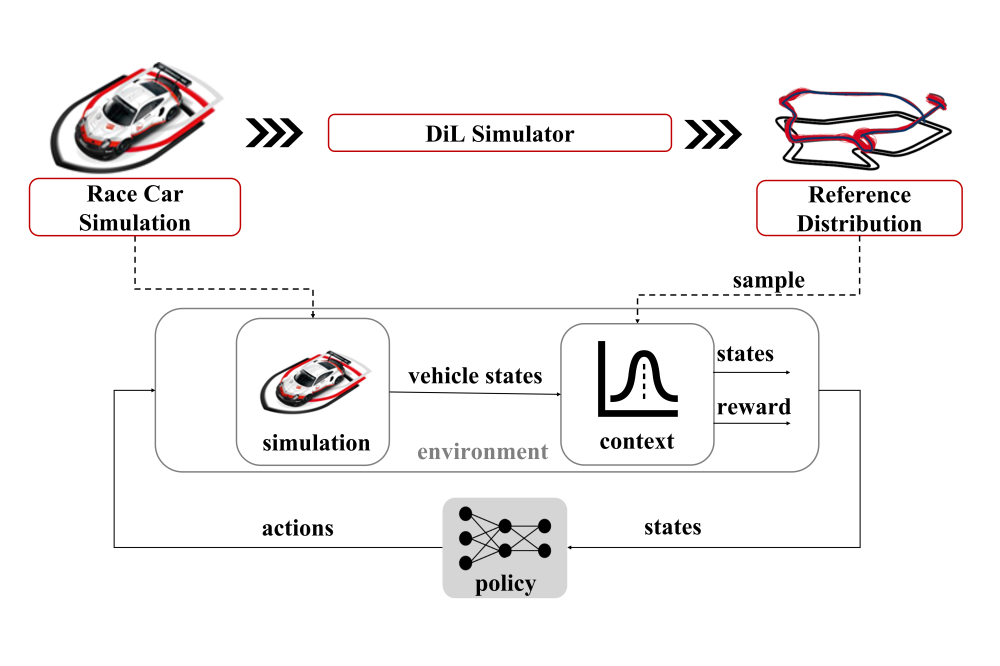
In order to facilitate rapid prototyping and testing in the advanced motorsport industry, we consider the problem of ...
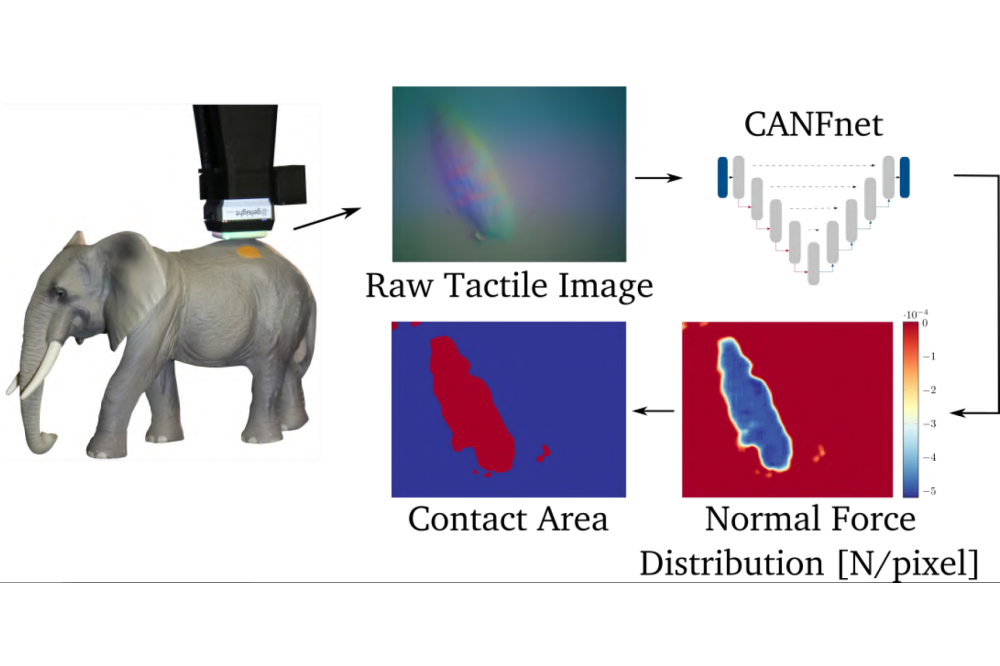
Visuotactile sensors are gaining momentum in robotics because they provide high-resolution contact measurements at a ...
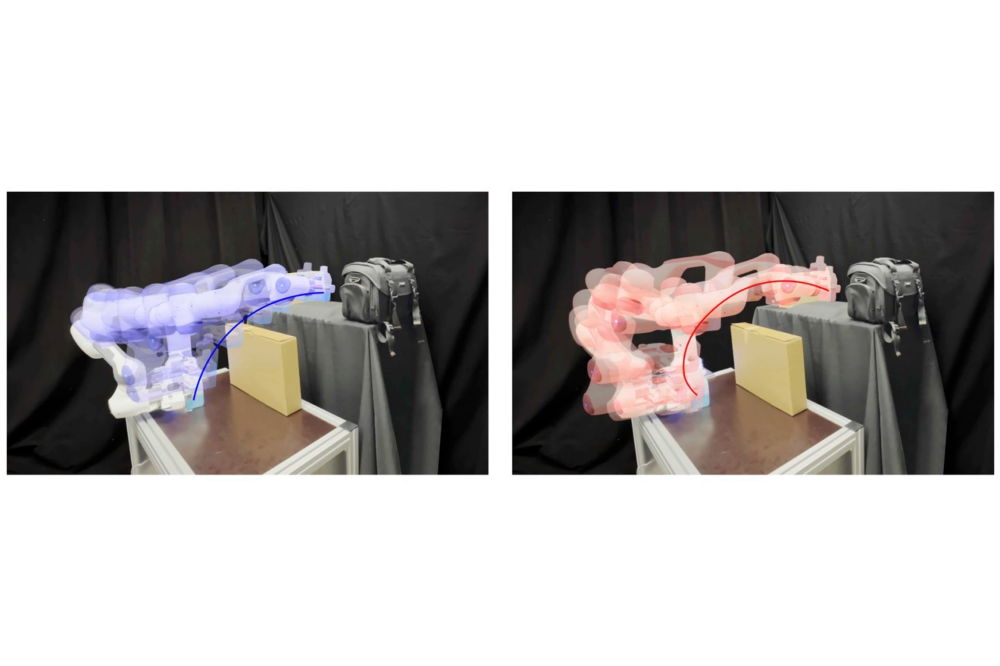
Motion planning is a crucial component of autonomous robot systems. It addresses the problem of finding a feasible ...
Reinforcement Learning (RL) is a promising tool for solving complicated control and decision-making tasks in a data ...
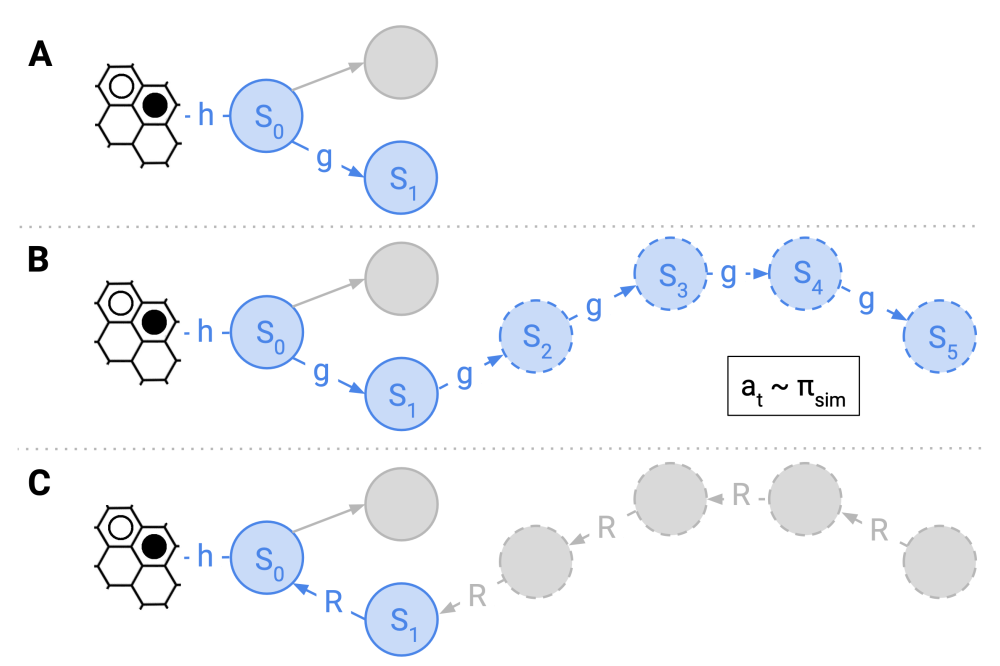
Planning algorithms have shown impressive performance in many domains such as chess and Go. In particular, Monte Carlo ...

Robotic manipulation stands as a largely unsolved problem despite significant advances in robotics and machine learning ...

Autonomous robotic assembly requires a well-orchestrated sequence of high-level actions and smooth manipulation ...
In variational inference, we want to approximate an intractable target distribution (often given as a posterior ...
Achieving long-horizon dexterous manipulation remains a challenging problem in robotics. There exists a long history of ...
Deep Learning is the major component of the success of most new Artificial Intelligence applications. A new promising ...
Trajectory optimization and model predictive control are essential techniques underpinning advanced robotic applications ...
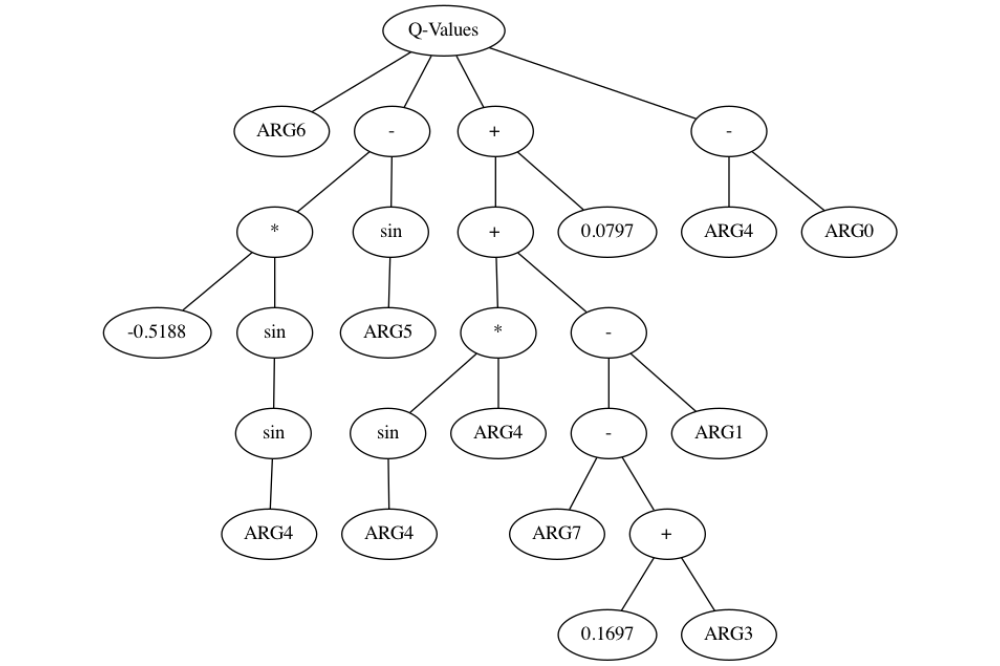
Reinforcement Learning is a powerful approach to achieve optimal behaviour. However, it typically requires a manual ...
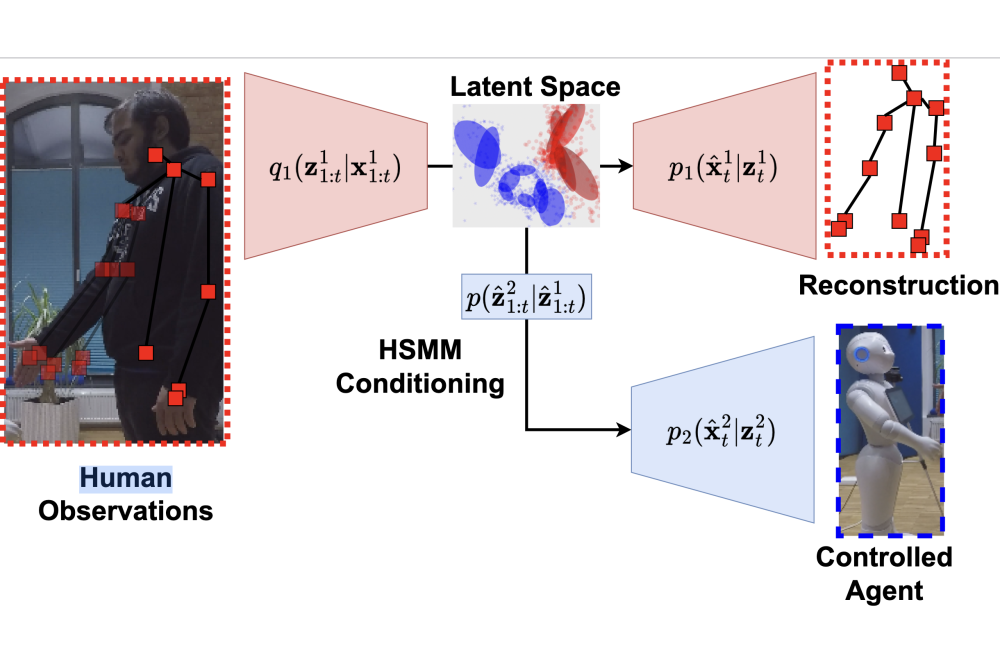
Modeling interaction dynamics to generate robot trajectories that enable a robot to adapt and react to a human’s actions ...
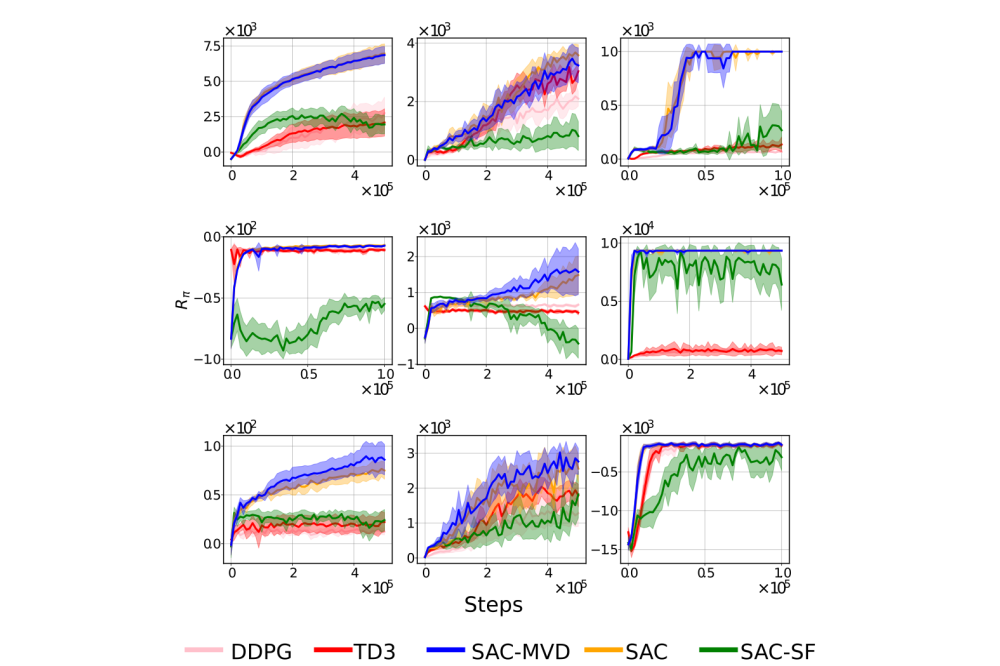
Reinforcement learning methods for robotics are increasingly successful due to the constant development of better policy ...
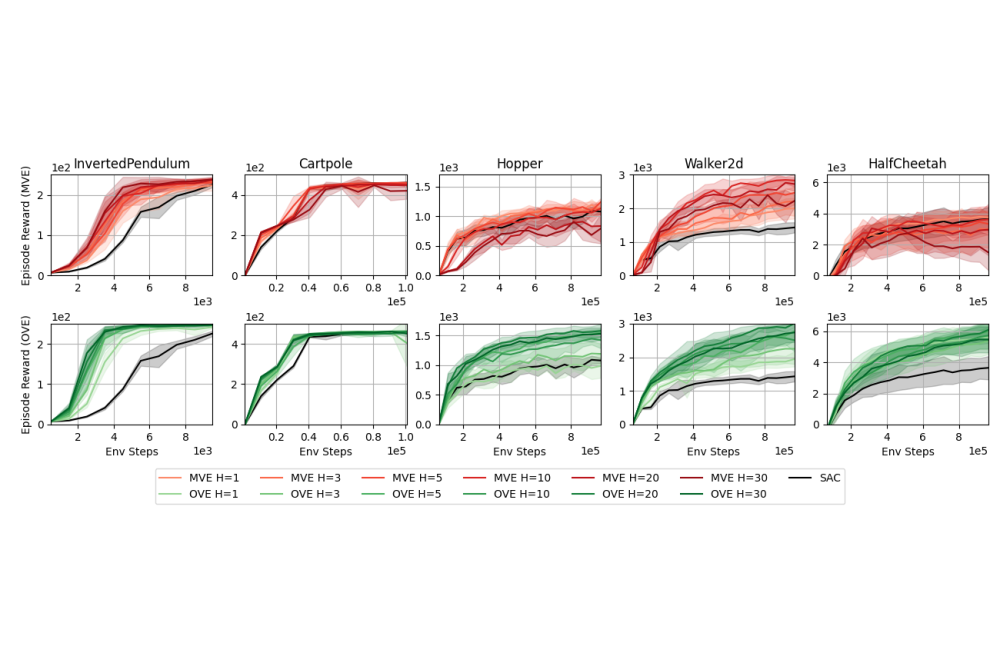
Model-based value expansion methods promise to improve the quality of value function targets and, thereby, the ...
The Nonparametric Off-Policy Policy Gradient (NOPG) is a policy gradient algorithm to solve reinforcement learning tasks ...
Precise models of the system dynamics are crucial for model-based control and reinforcement learning (RL) in autonomous ...
Recurrent State-space models (RSSMs) are highly expressive models for learning patterns in time series data and system ...
Stochastic-search algorithms are problem independent algorithms well-suited for black-box optimization of an objective ...
Traditionally robots have been used in factories in predefined structured environments. Recently, robots are employed ...
The project investigated probabilistic motor skill learning for simulated robots. In detail the project looked into the ...