Learning to Plan
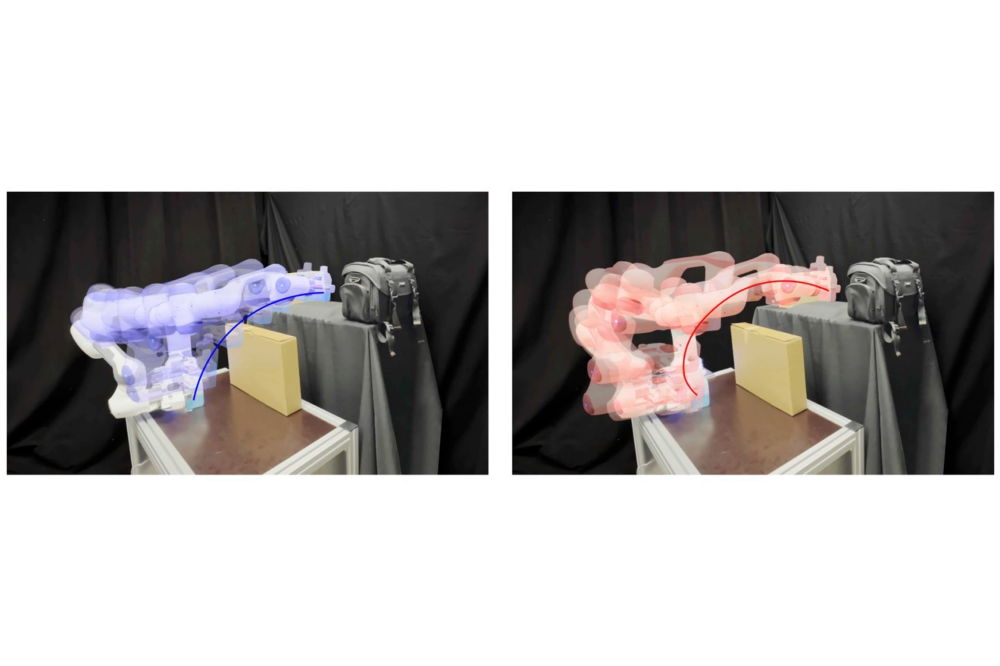
Motion planning is a crucial component of autonomous robot systems. It addresses the problem of finding a feasible ...
Engineering Sciences
Computer Science
Motion planning is a crucial component of autonomous robot systems. It addresses the problem of finding a feasible ...
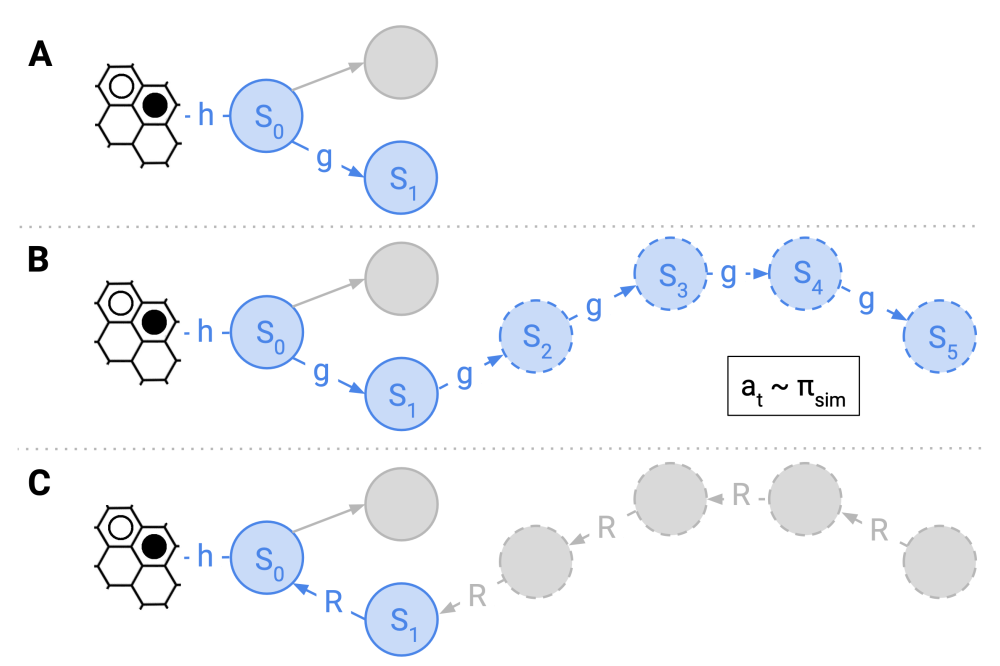
Planning algorithms have shown impressive performance in many domains such as chess and Go. In particular, Monte Carlo ...
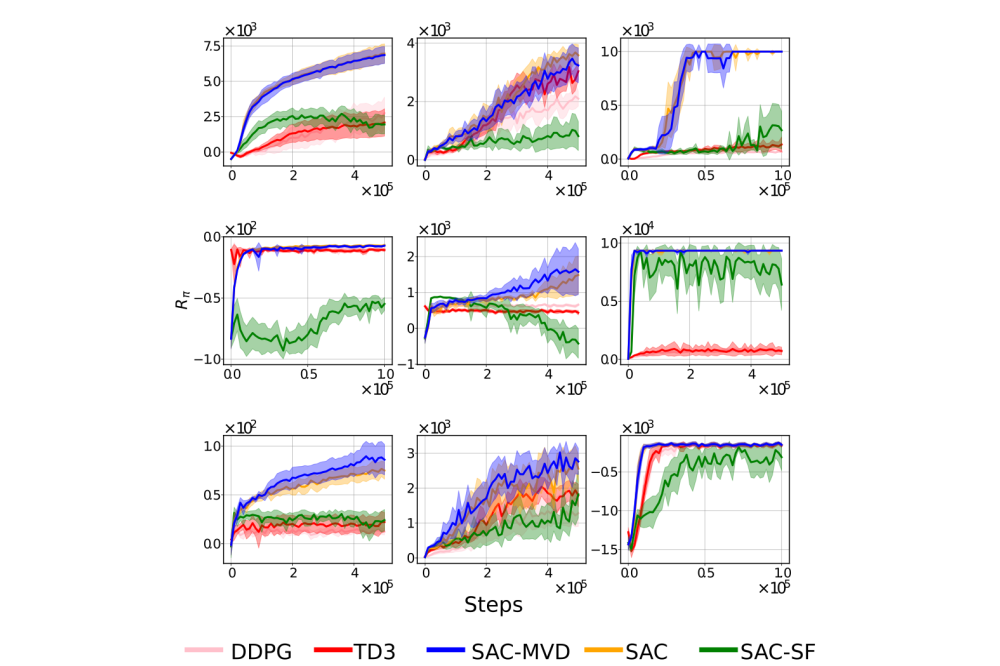
Reinforcement learning methods for robotics are increasingly successful due to the constant development of better policy ...
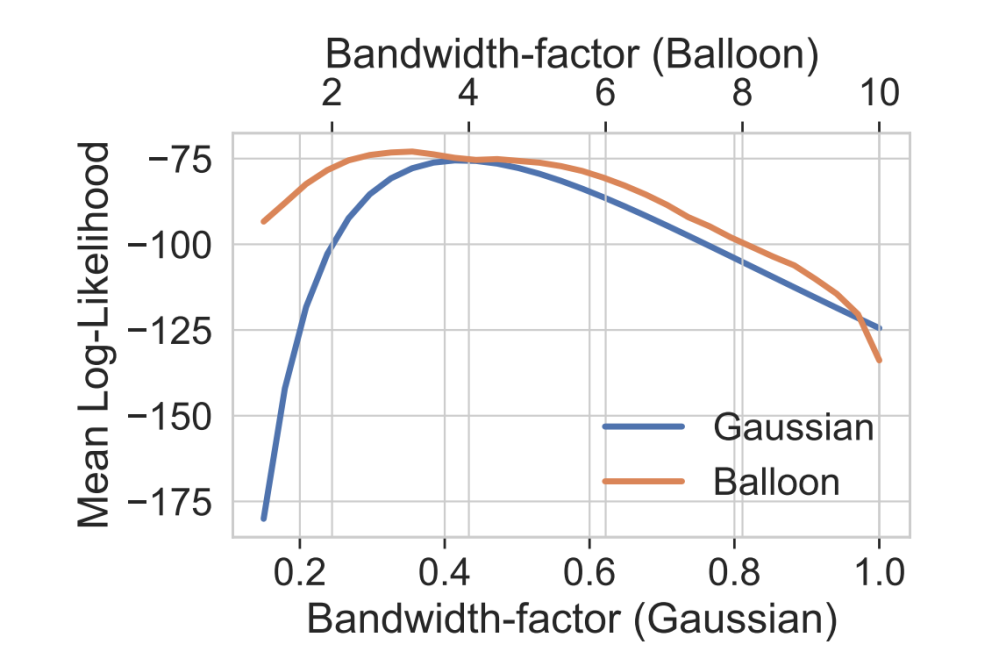
The Nonparametric Off-Policy Policy Gradient (NOPG) is a policy gradient algorithm to solve reinforcement learning tasks ...