Caption
Figure 1: Real-world setup for transfer learning on a Franka Emika robotic arm. In this case, it autonomously performs the language-conditioned task: Pick up the tomato and place it in the pot.
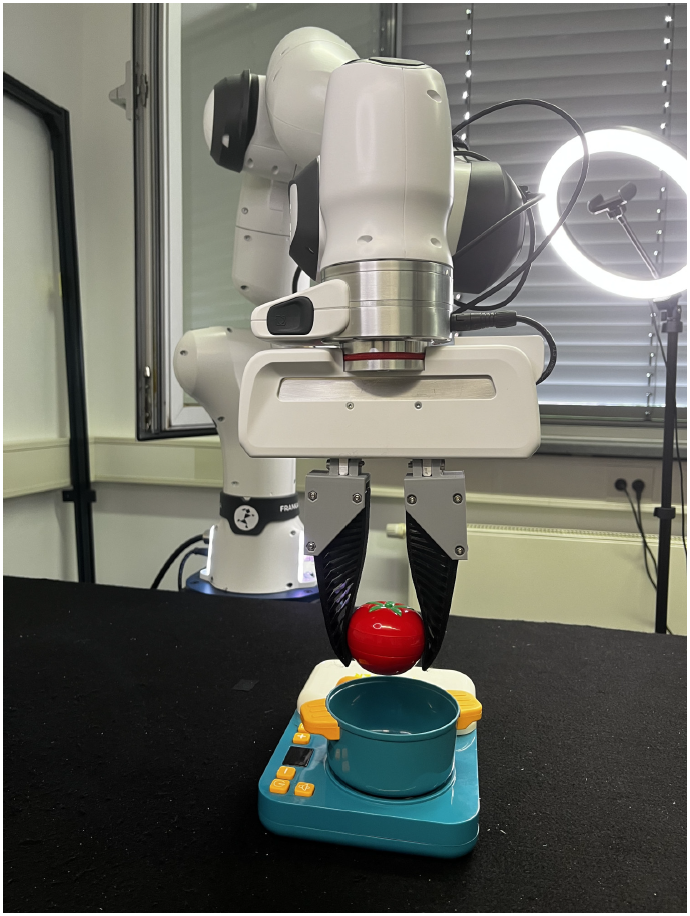
Figure 1: Real-world setup for transfer learning on a Franka Emika robotic arm. In this case, it autonomously performs the language-conditioned task: Pick up the tomato and place it in the pot.