Caption
Figure 1: Execution of multimodal trajectories the Franka Panda robot. The motion in blue and red start and end at the same joint configurations, but it is possible to see two modes resulting from sampling trajectories with MPD.
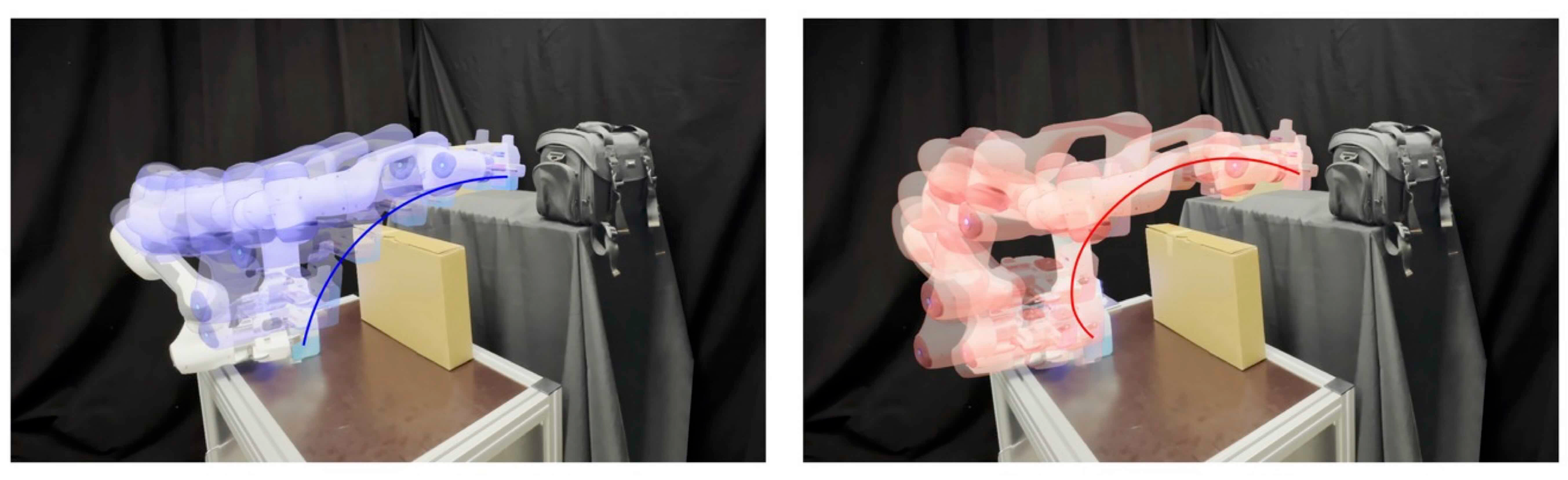
Figure 1: Execution of multimodal trajectories the Franka Panda robot. The motion in blue and red start and end at the same joint configurations, but it is possible to see two modes resulting from sampling trajectories with MPD.