Caption
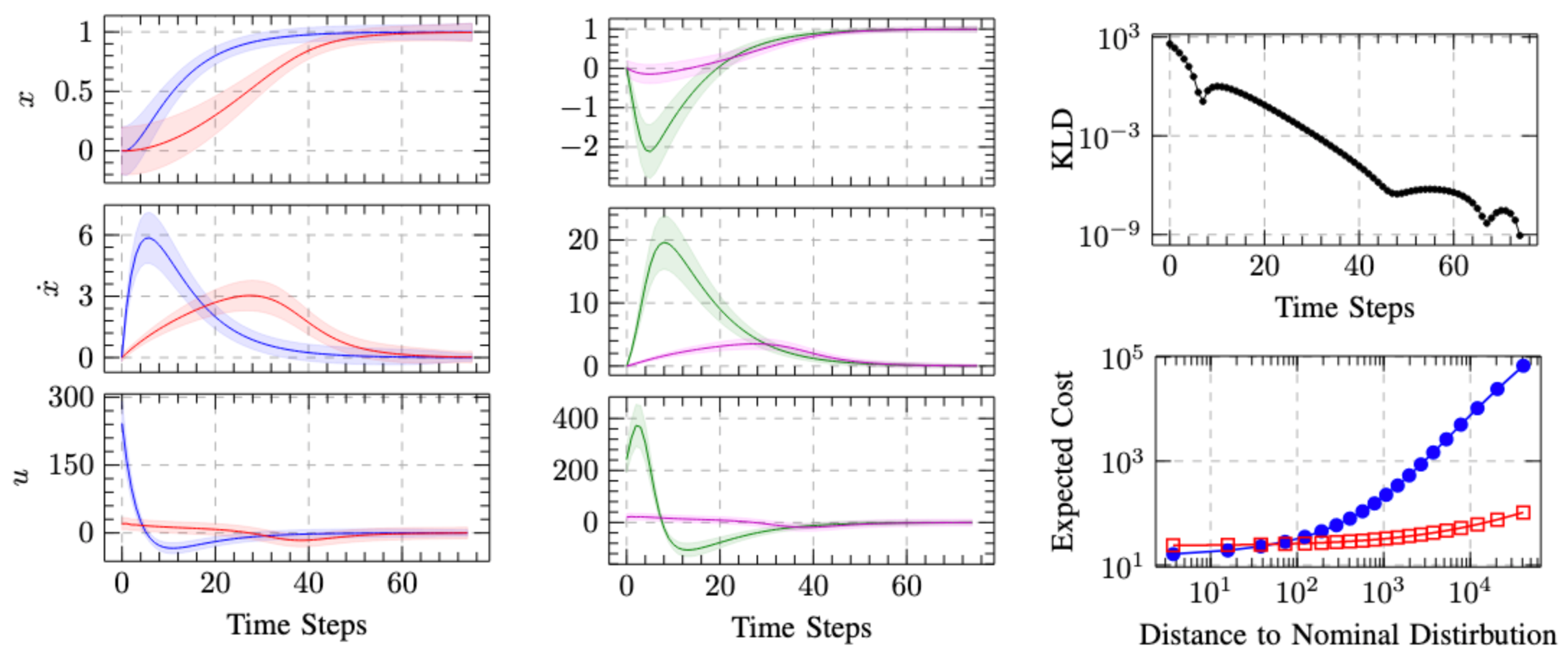
Figure 1: Comparison of standard (blue/green) and distributionally robust (red/magenta) controllers on a mass-spring-damper linear system evaluated on the nominal dynamics (left) and under the worst-case disturbance (middle). Trust-region KL-divergence (KLD) budget over time in the worst-case setting (top right) and expected cost as a function of the disturbance (bottom right) illustrate the performance of the proposed method.