Projects
Hessian scientists of various disciplines are using High Performance Computers for their research.
Hessian scientists of various disciplines are using High Performance Computers for their research.
Displaying 1 - 9 of 9

Robotic manipulation stands as a largely unsolved problem despite significant advances in robotics and machine learning ...
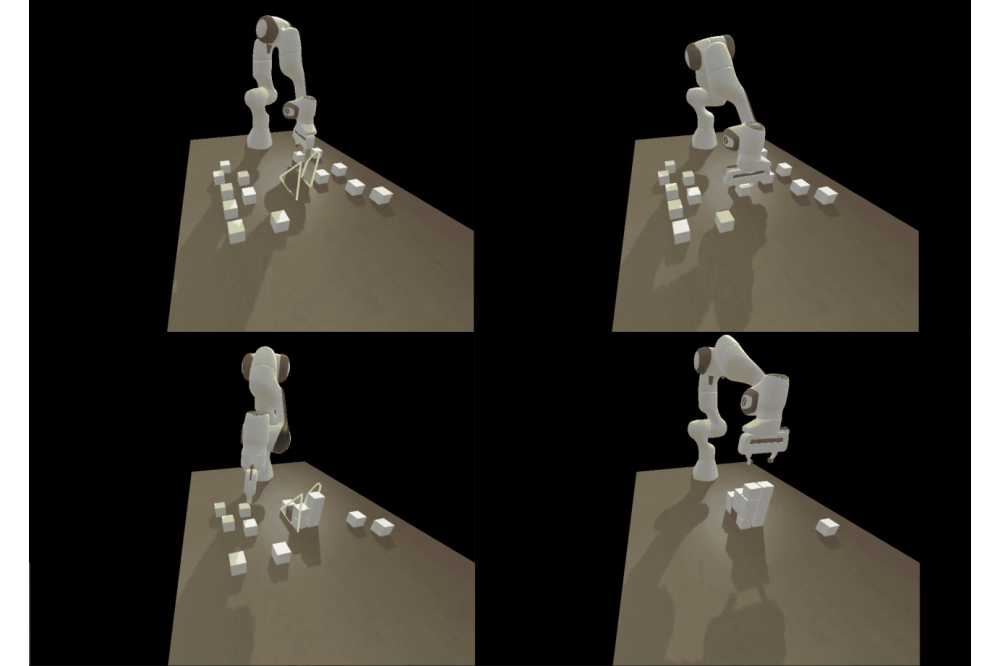

Autonomous robotic assembly requires a well-orchestrated sequence of high-level actions and smooth manipulation ...
The increase in complex cyber-attacks illustrates the vulnerability of society and information infrastructure. In ...

Achieving long-horizon dexterous manipulation remains a challenging problem in robotics. There exists a long history of ...
Natural visuomotor control tasks such as pouring liquids into cups are trivial for humans but are challenging to model ...
The Nonparametric Off-Policy Policy Gradient (NOPG) is a policy gradient algorithm to solve reinforcement learning tasks ...
The aim of the project is to develop a new family of optimization algorithms to handle convex constraints and evaluate ...
Precise models of the system dynamics are crucial for model-based control and reinforcement learning (RL) in autonomous ...
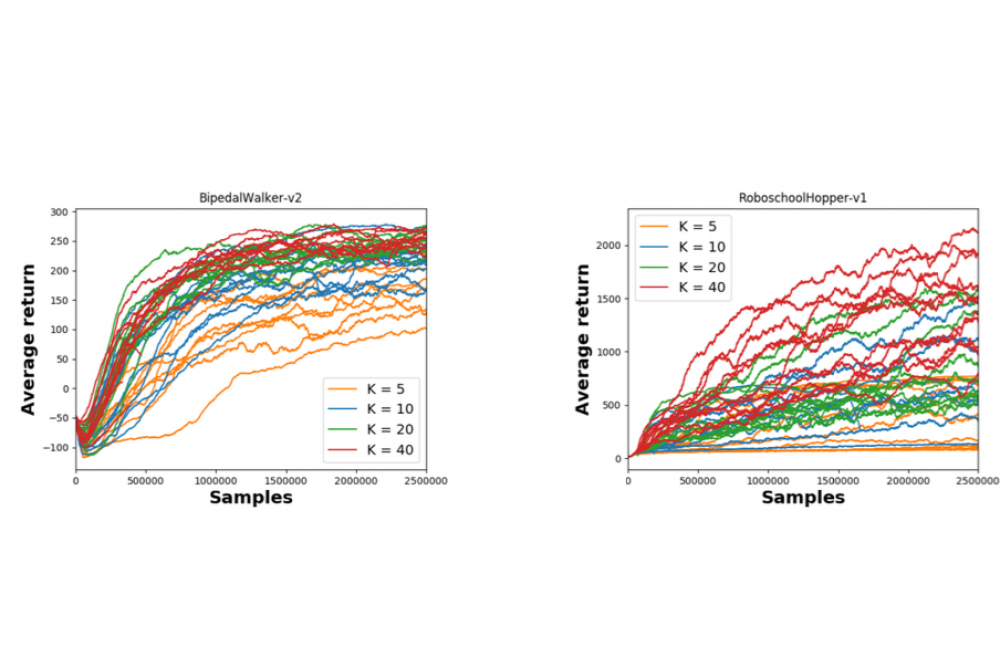
Deep Reinforcement Learning can solve difficult high dimensional tasks, by exploiting the expressive representation ...