Skip to main content
HKHLR - HPC Hessen
Mobile Navigation
Navigation
En
De
Link State
Land Hessen
Main Navigation - English
Service
Overview
Support
Cluster
Tutorials
Software
Material
Link Collection
Events
Overview
Courses and Tutorials
Cluster Introductions
HiPerCH Workshops
External Events
Research
Overview
Projects
Research Videos
About us
Overview
Team
Organization
News
Feedback
Jobs
Contact
HKHLR
Universities
Tateo_Davide_Deep Reinforcement Learning for Robotics_Fig3
Tateo_Davide_Deep Reinforcement Learning for Robotics_Fig3
Caption
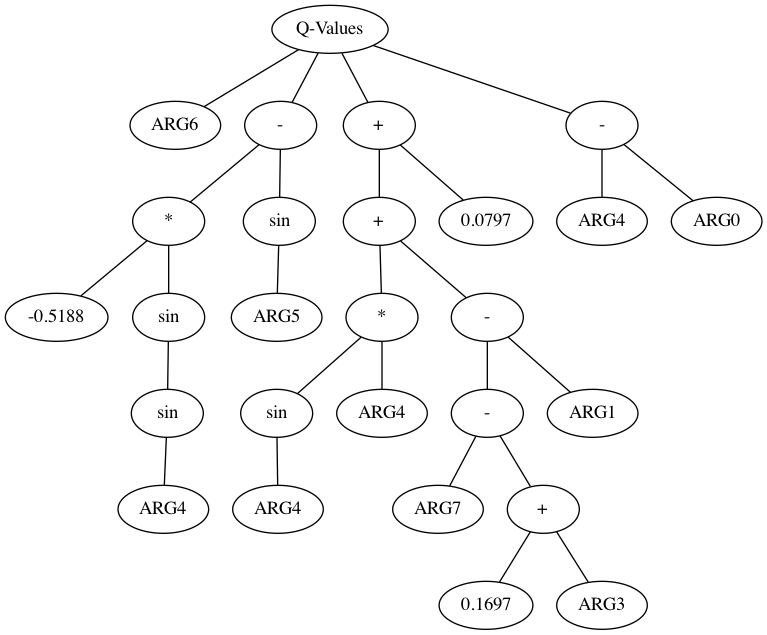
Figure 3: Example of interpretable policy learned during the interaction with the environment.
Participating Universities
Main Navigation - en - foot
Service
Overview
Support
Cluster
Tutorials
Software
Material
Link Collection
Events
Overview
Courses and Tutorials
Cluster Introductions
HiPerCH Workshops
External Events
Research
Overview
Projects
Research Videos
About us
Overview
Team
Organization
News
Feedback
Jobs
Contact
HKHLR
Universities
Meta Navigation - English
Privacy Policy
Imprint