Projekte
Hessische Wissenschaftlerinnen und Wissenschaftler unterschiedlichster Disziplinen benötigen Hochleistungsrechnen für ihre Forschung.
Hessische Wissenschaftlerinnen und Wissenschaftler unterschiedlichster Disziplinen benötigen Hochleistungsrechnen für ihre Forschung.
Displaying 1 - 27 of 27
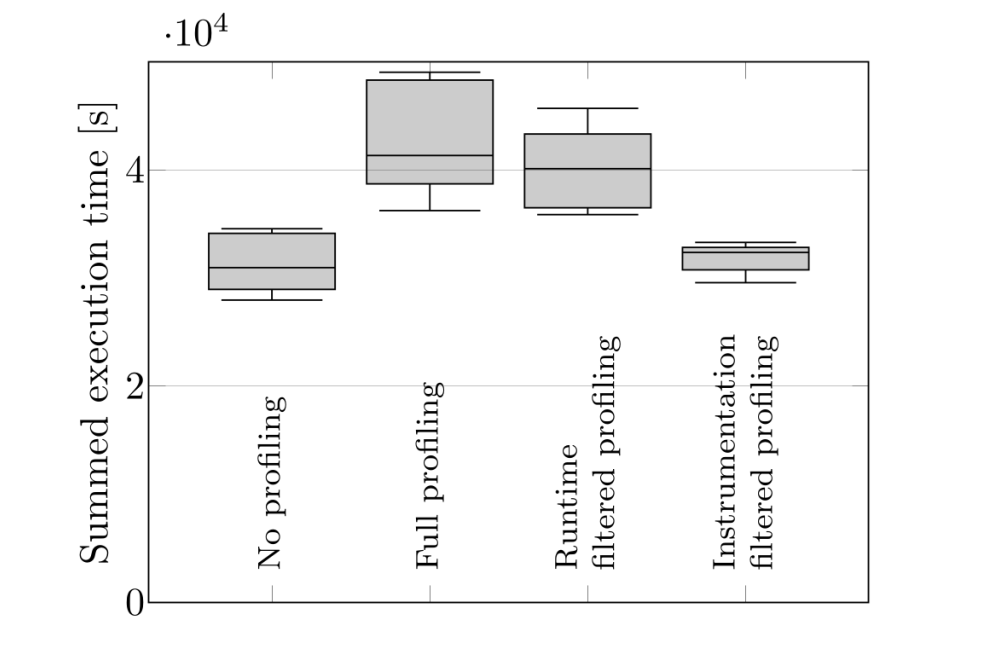
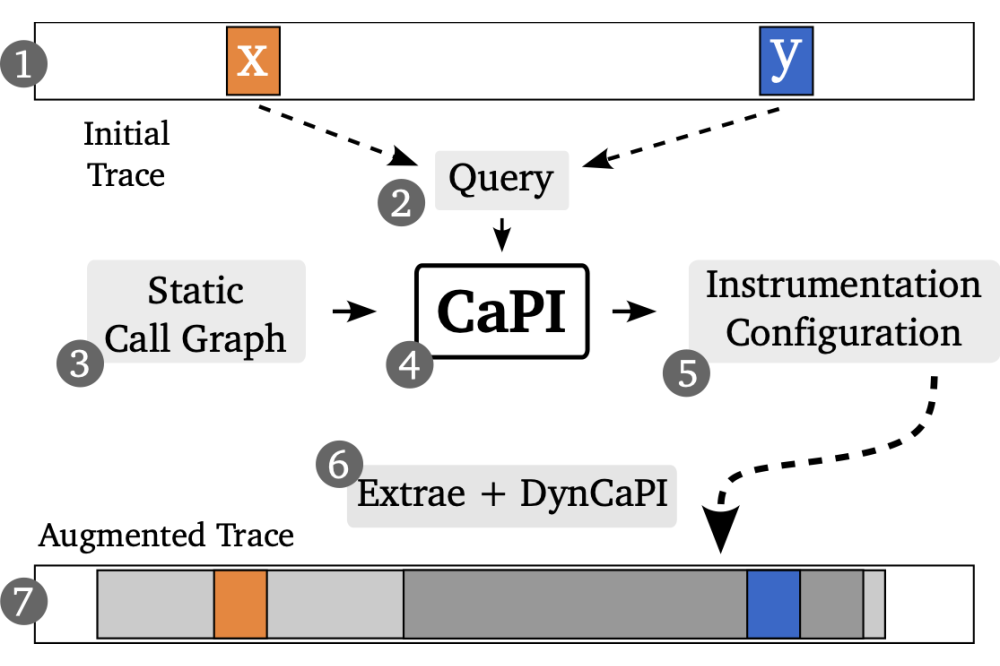
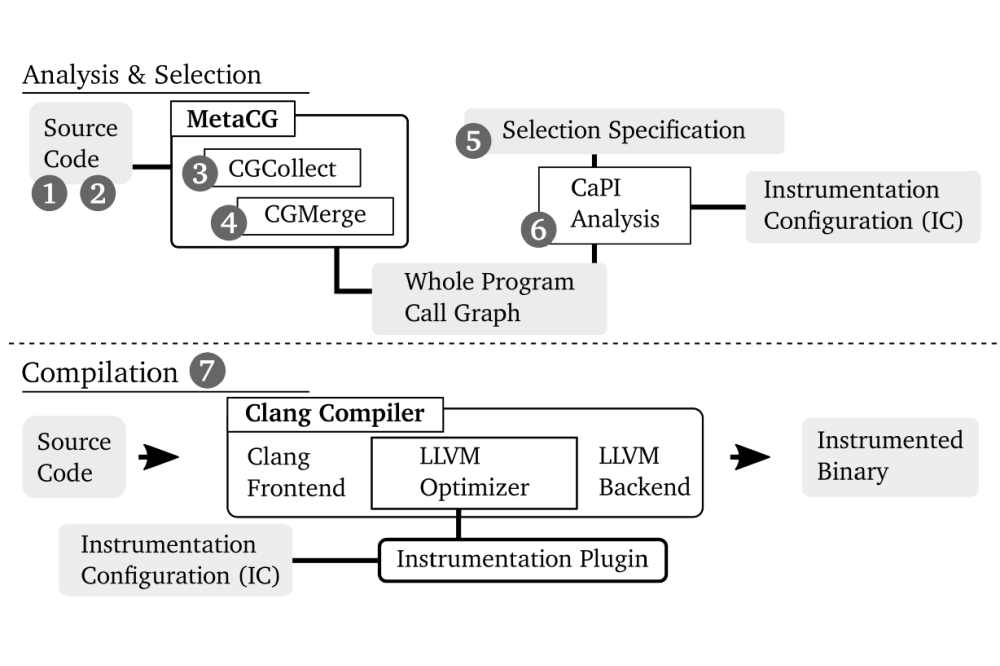
HPC applications can contain implicit performance bottlenecks, for example, due to caching or synchronization effects ...
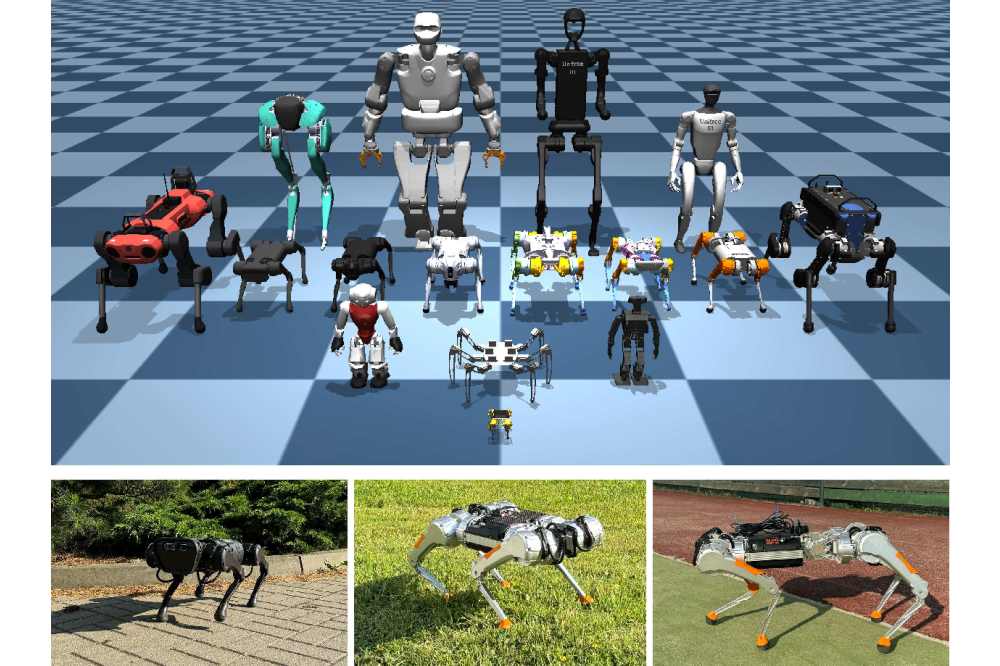
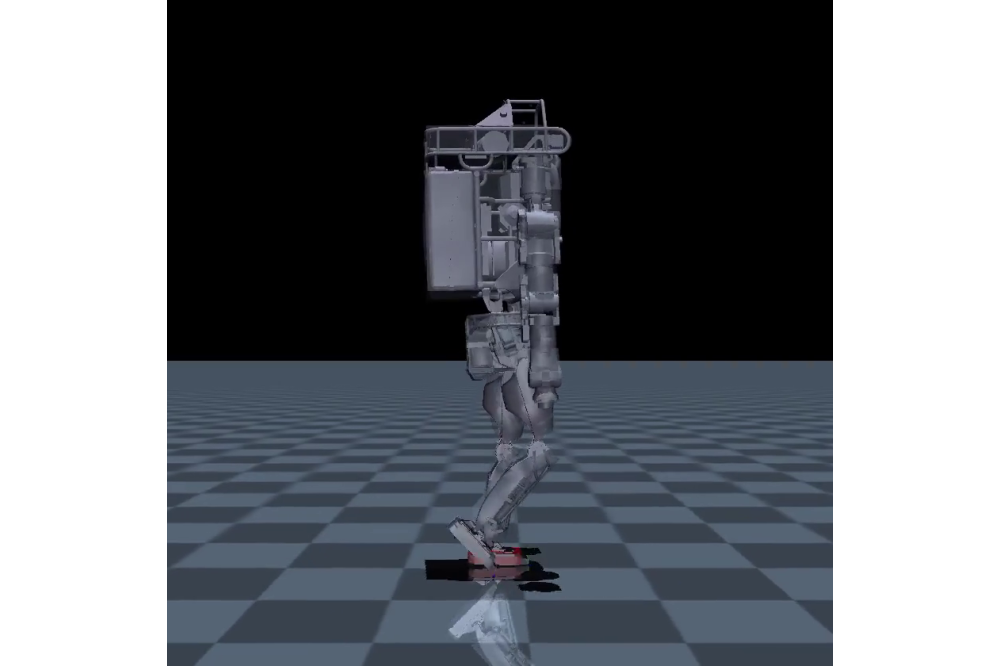
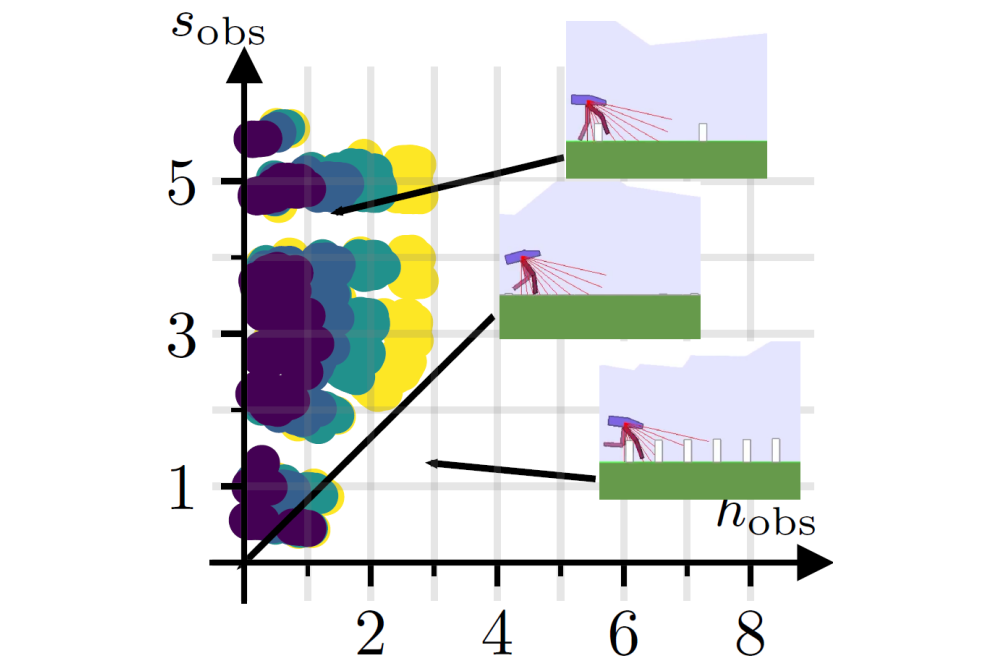
The rapid development of robotics has enabled legged robots capable of performing highly dynamic tasks such as walking ...
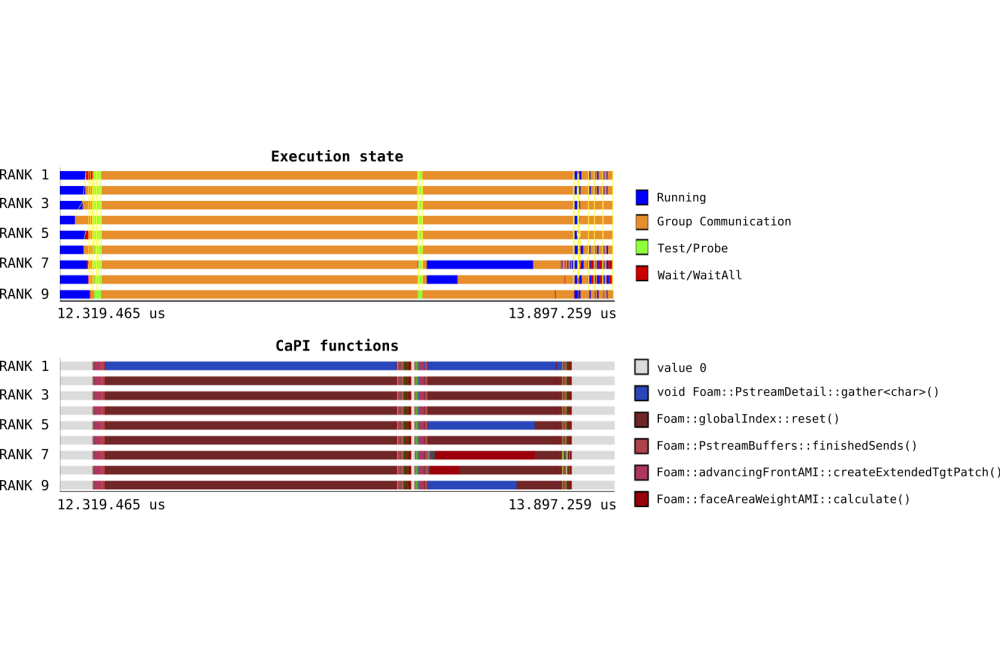
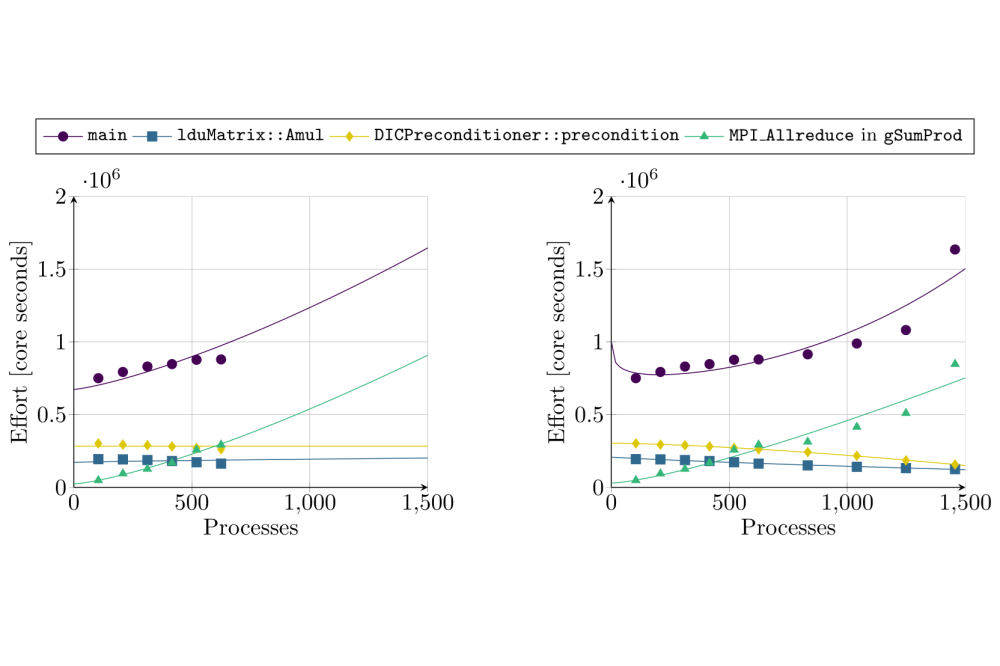
The exaFOAM project [1] aims at overcoming the current limitations of Computational Fluid Dynamics (CFD) technology ...

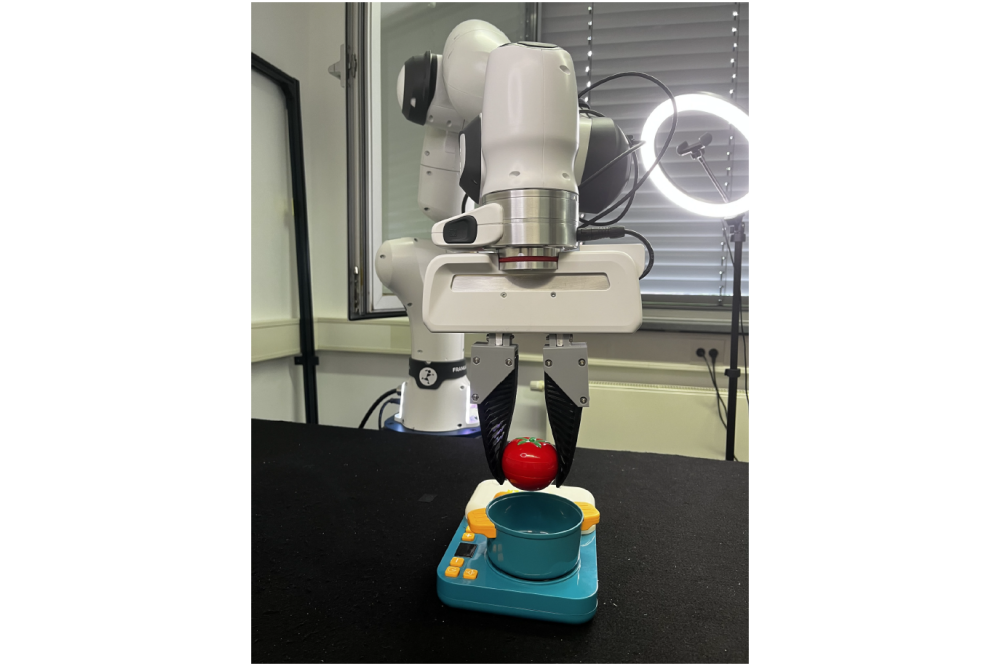
Up-to-date contact-rich manipulation tasks remain one of the grand challenges of robotics. Equipping robots with a sense ...
General-purpose intelligent robots are expected to simultaneously handle multiple tasks while interpreting various ...
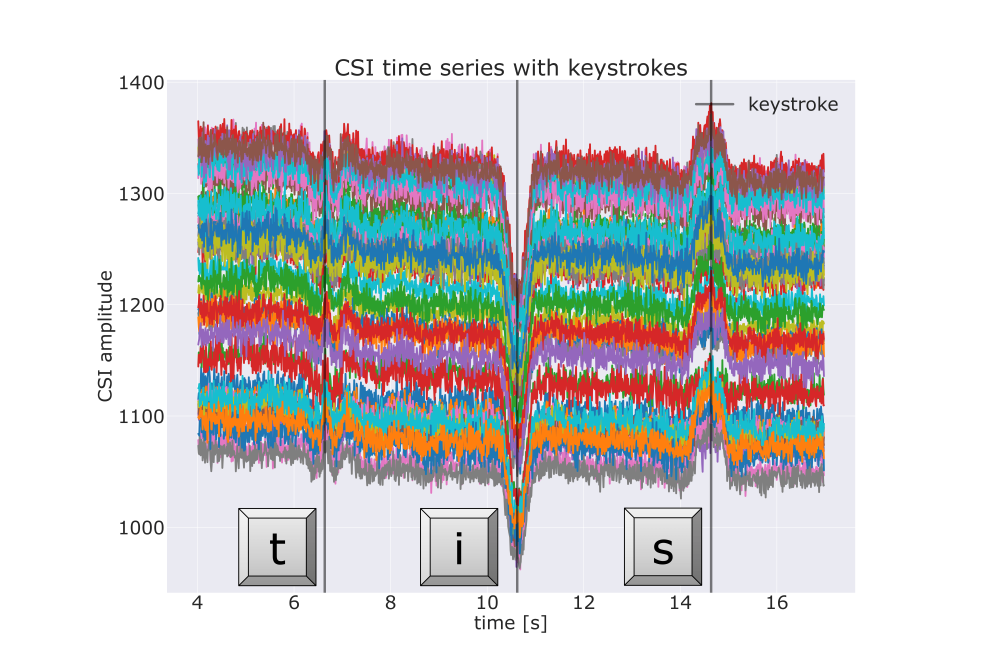
During keyboard typing, hand and finger movements induce alterations in Wi-Fi signal propagation, reflected in Channel ...

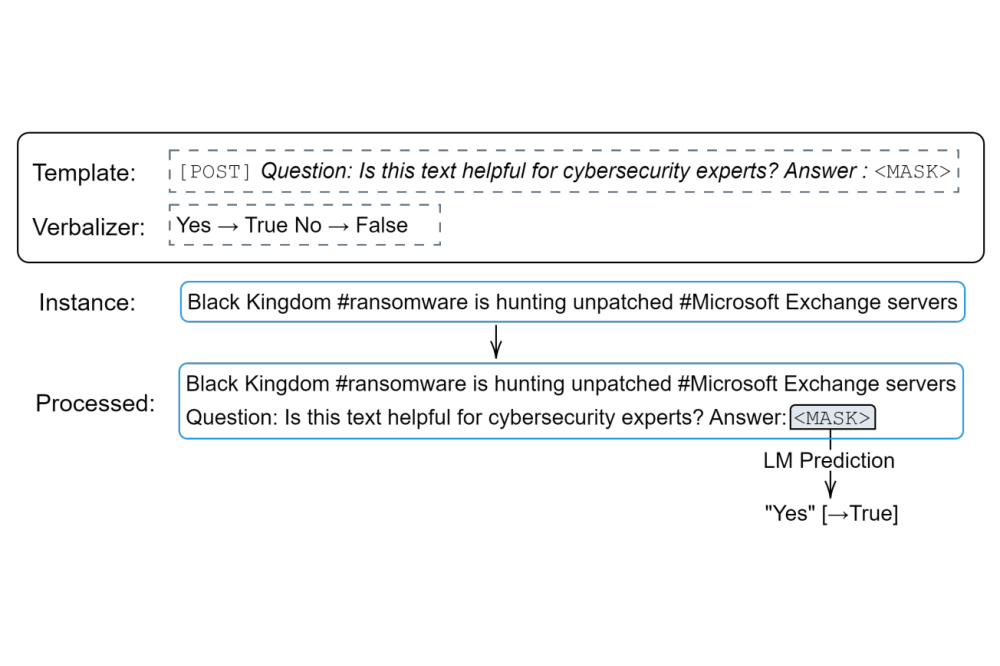
The increase in complex cyber-attacks illustrates the vulnerability of society and information infrastructure. In ...
In robotic applications such as autonomous driving and whole-body control, ensuring safety is of utmost importance ...

Robotics platforms can massively benefit from novel Deep Reinforcement Learning approaches. However, robotics have ...
Acoustic keylogging describes a category of side-channel attacks that recover typed keystrokes from audio-streams of ...
Understanding the underlying reward mechanisms of human locomotion and transferring this knowledge to humanoid robots is ...
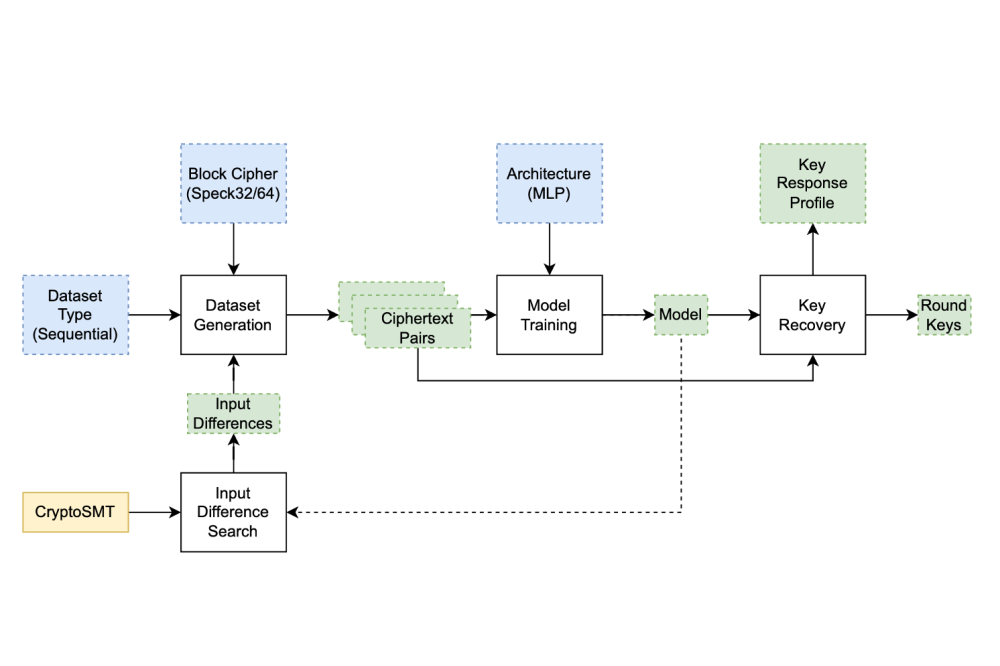

Lightweight Cryptography is about developing and analyzing algorithms that provably obtain security goals, such as ...
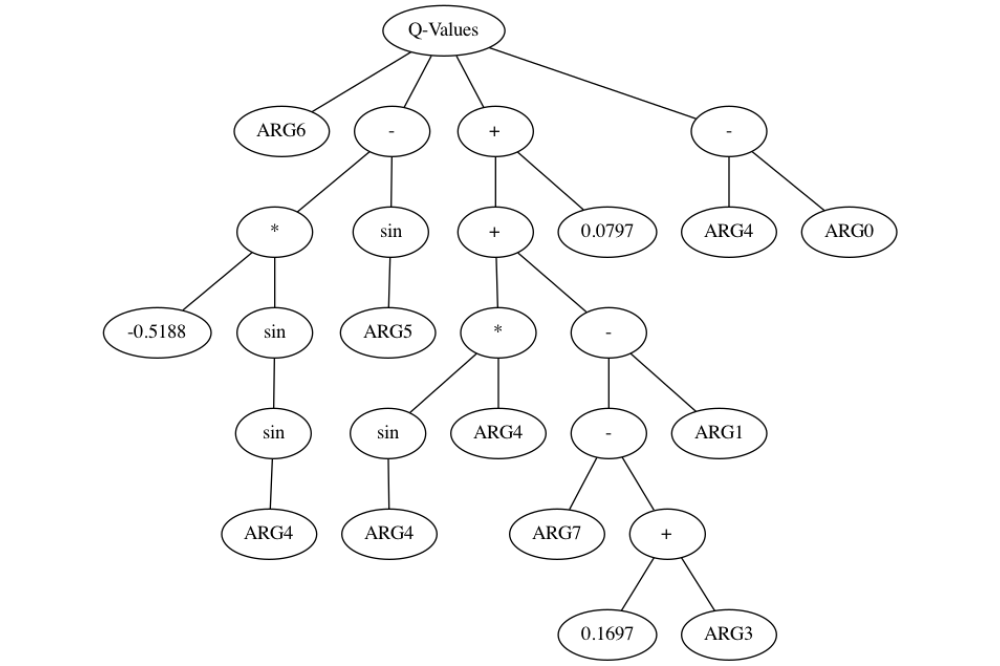
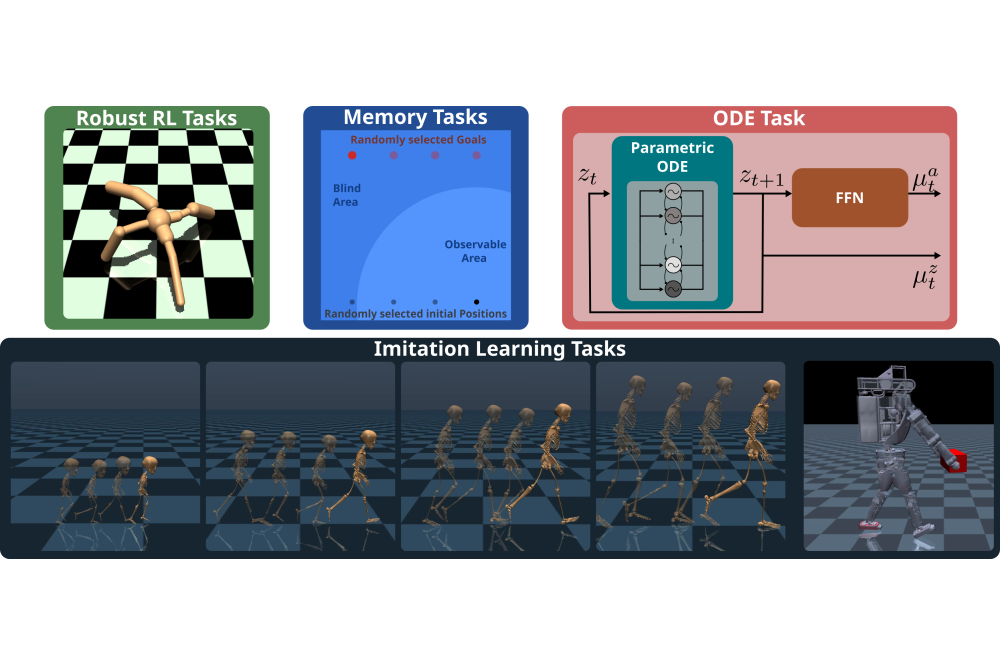
Reinforcement Learning (RL) is a promising tool for solving complicated control and decision-making tasks in a data ...
Autonomous robots need to be able to identify and recognize objects in a scene. For this crucial task we need to ...
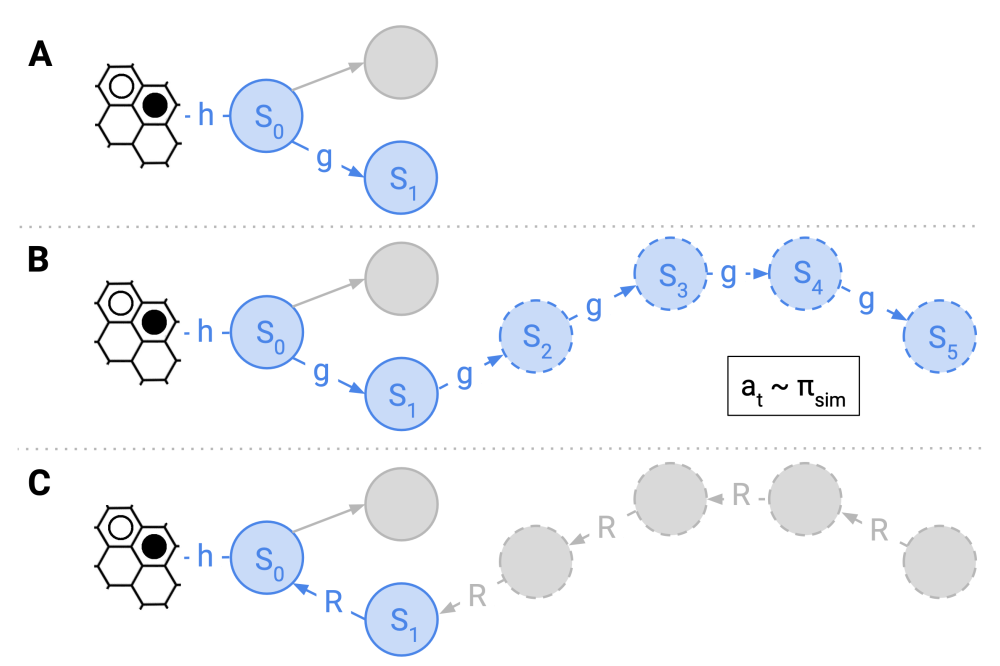
Planning algorithms have shown impressive performance in many domains such as chess and Go. In particular, Monte Carlo ...

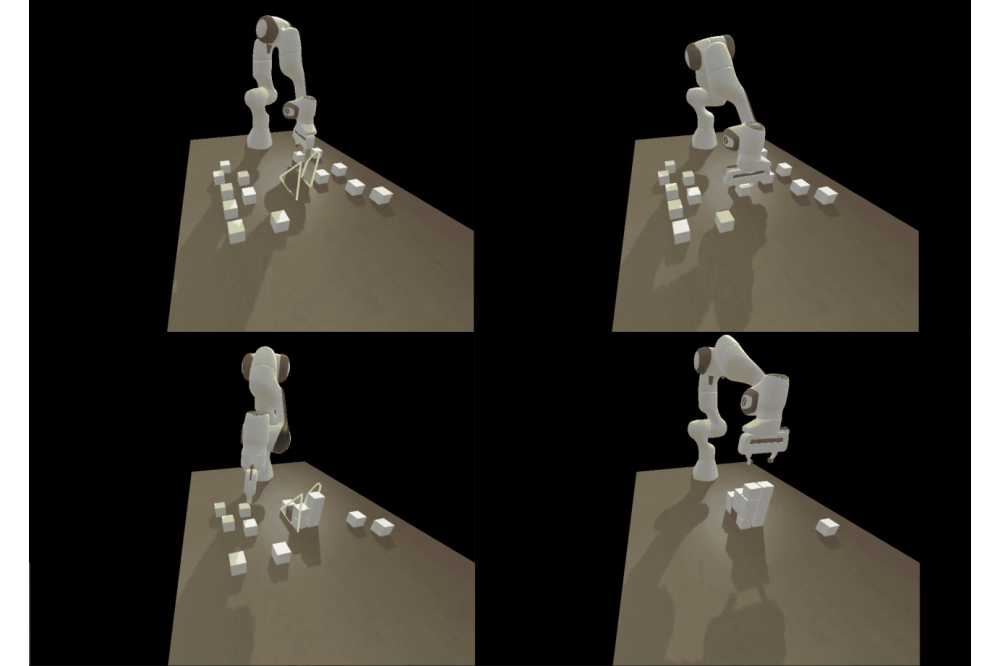
Robotic manipulation stands as a largely unsolved problem despite significant advances in robotics and machine learning ...

Autonomous robotic assembly requires a well-orchestrated sequence of high-level actions and smooth manipulation ...
The increase in complex cyber-attacks illustrates the vulnerability of society and information infrastructure. In ...
The exaFOAM project (https://exafoam.eu) aims at overcoming the current limitations of Computational Fluid Dynamics (CFD ...
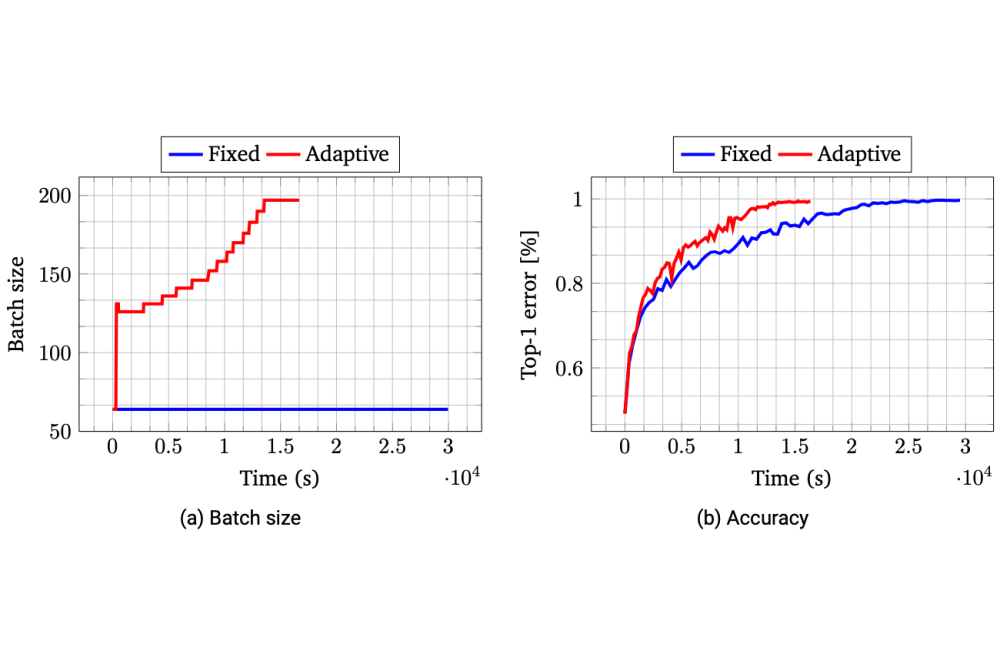
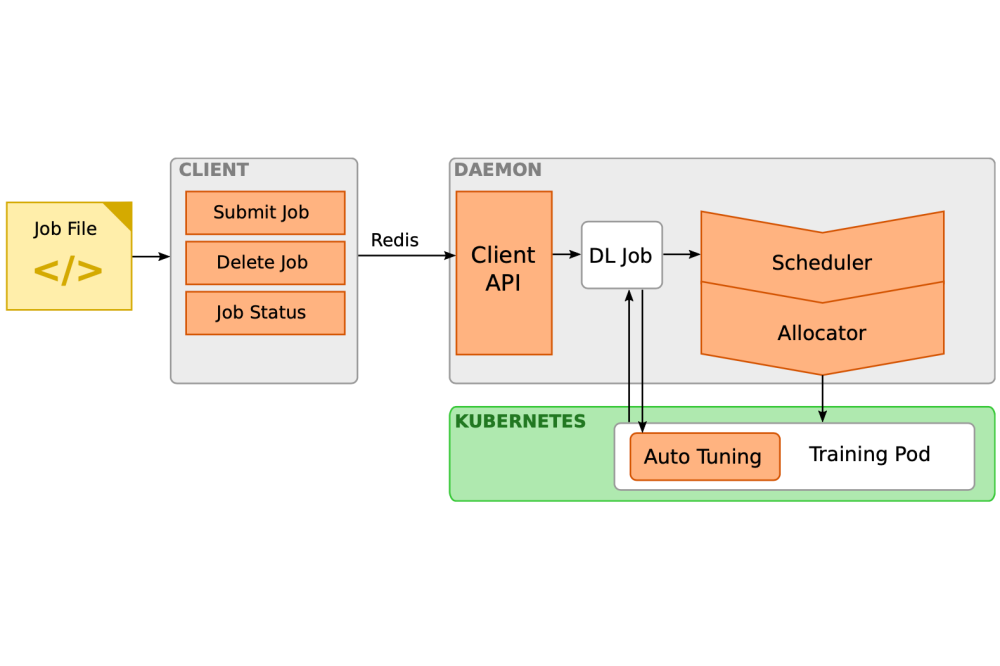
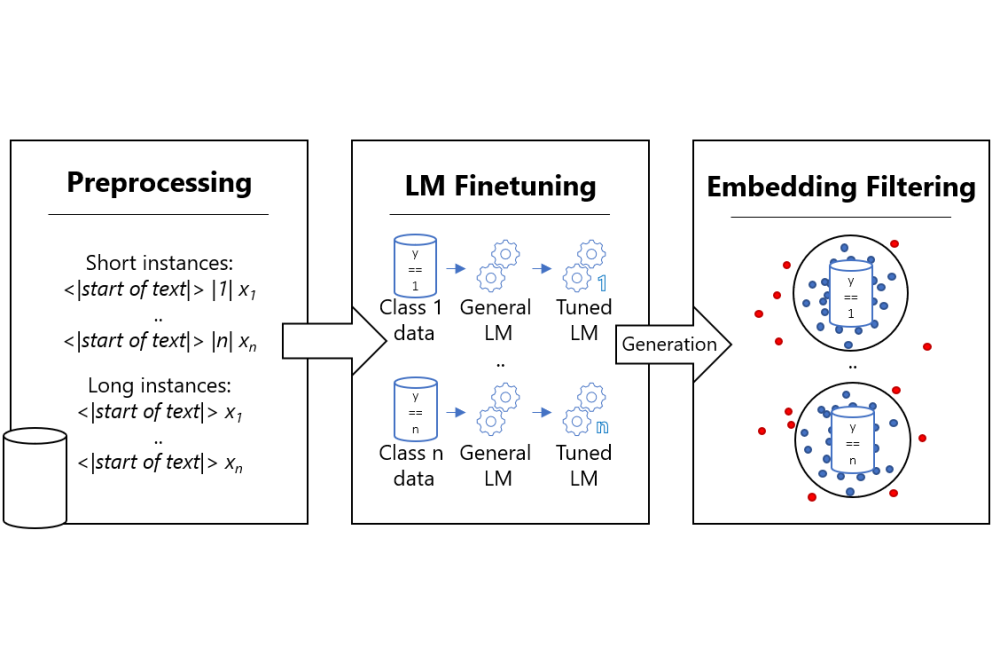
Within the last decade, deep neural networks have attracted much attention from academia and industry. Such a wide ...
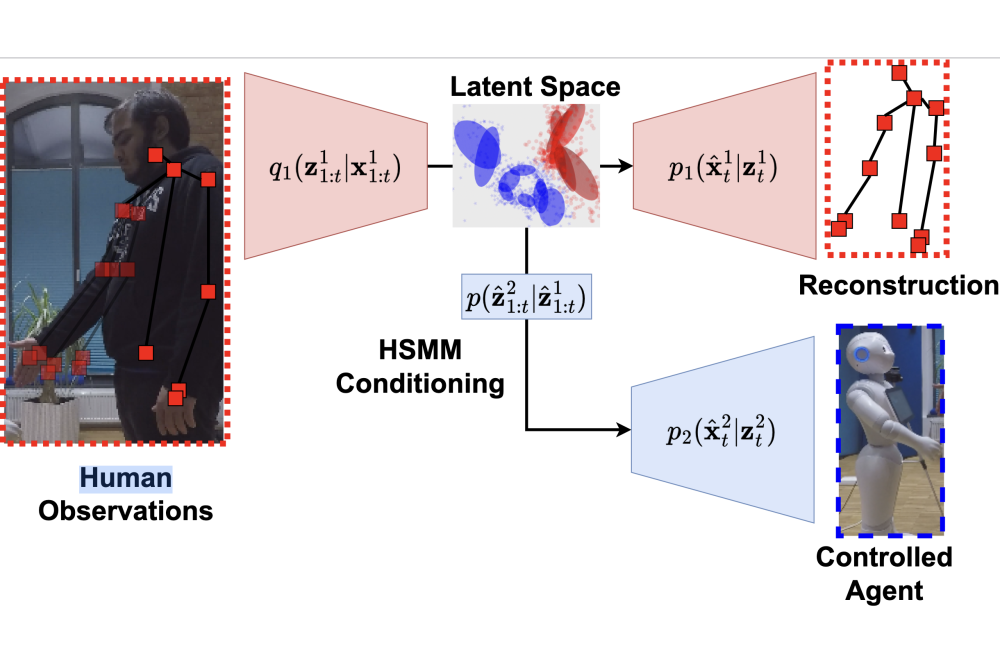
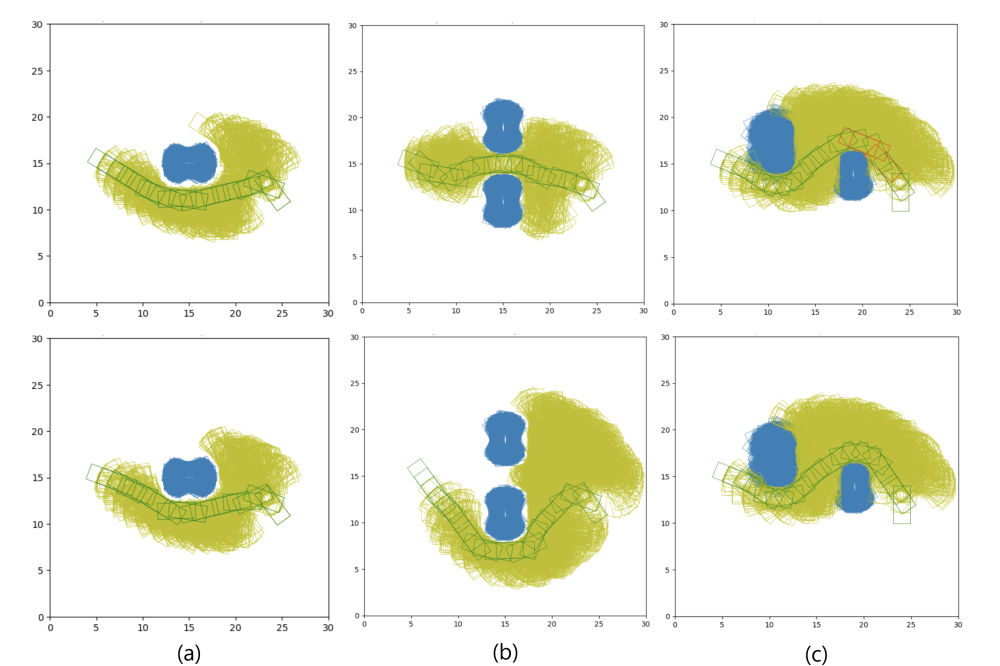
Modeling interaction dynamics to generate robot trajectories that enable a robot to adapt and react to a human’s actions ...
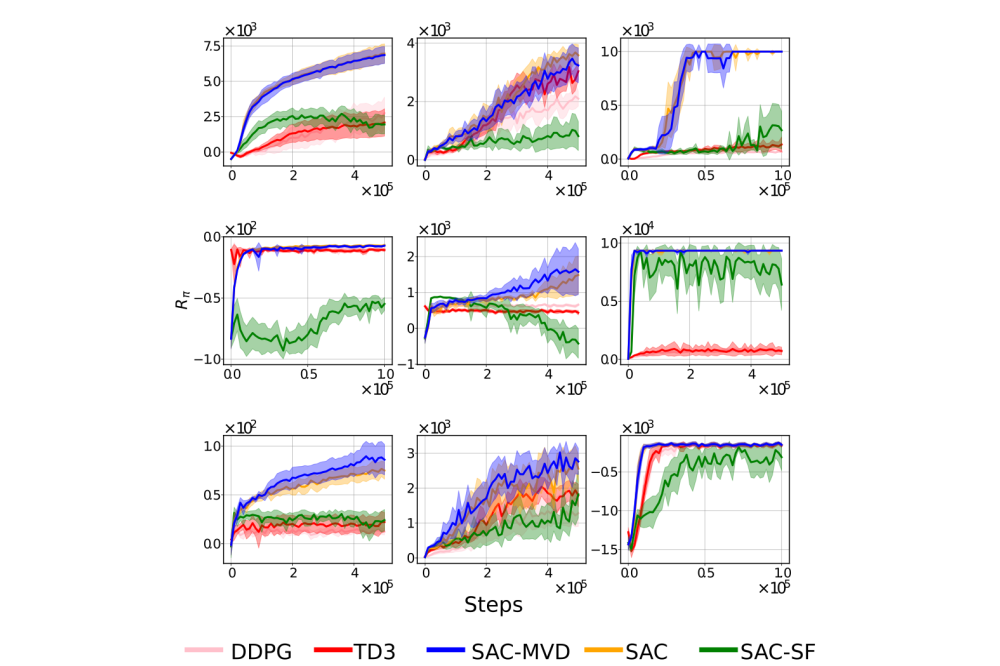
Reinforcement learning methods for robotics are increasingly successful due to the constant development of better policy ...
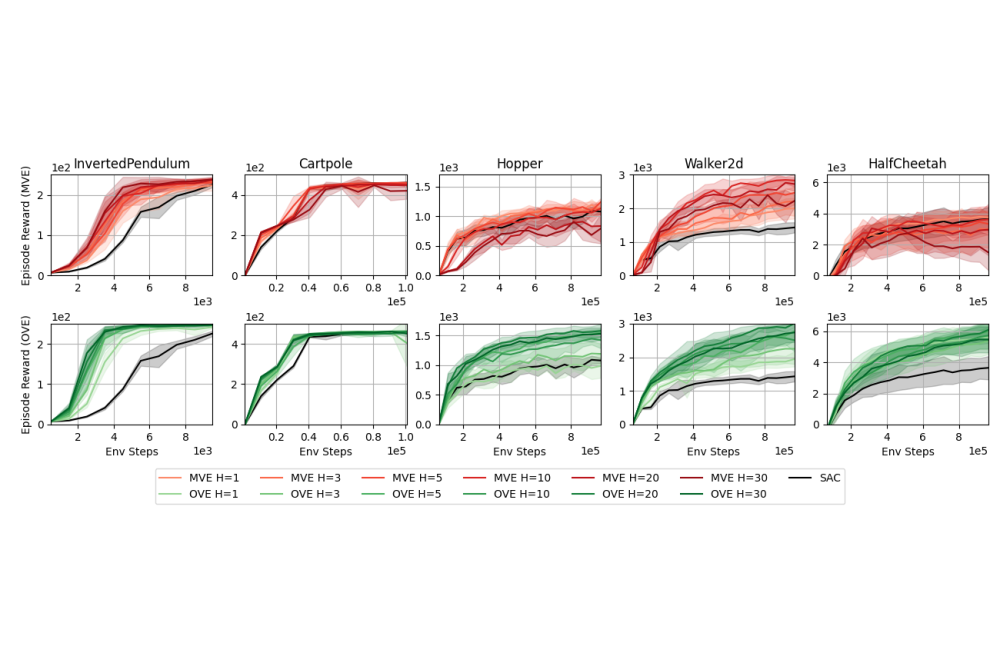
Model-based value expansion methods promise to improve the quality of value function targets and, thereby, the ...
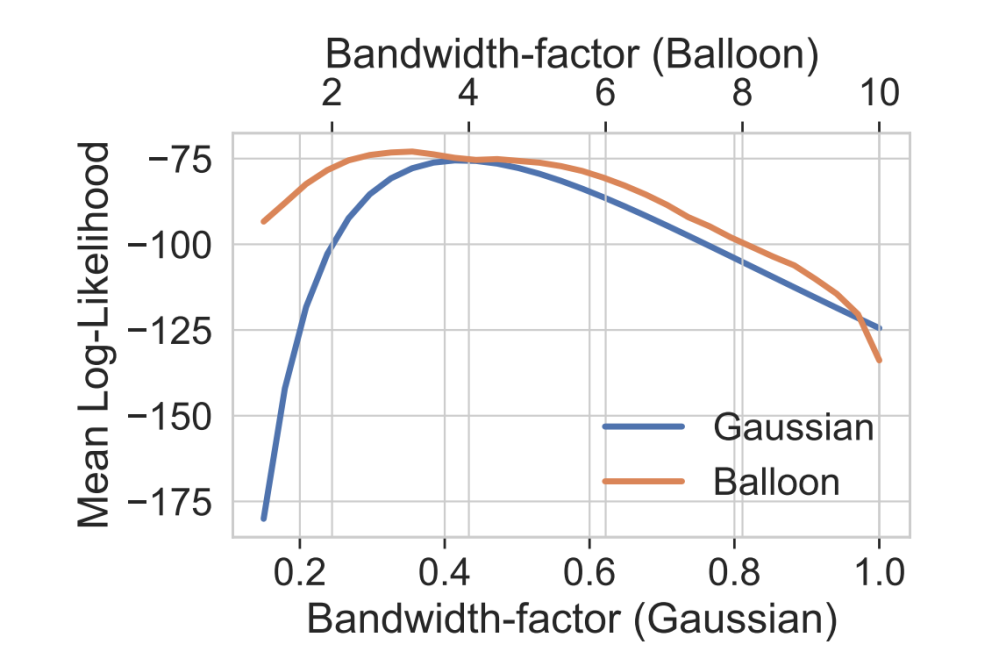
The Nonparametric Off-Policy Policy Gradient (NOPG) is a policy gradient algorithm to solve reinforcement learning tasks ...
The aim of the project is to develop a new family of optimization algorithms to handle convex constraints and evaluate ...
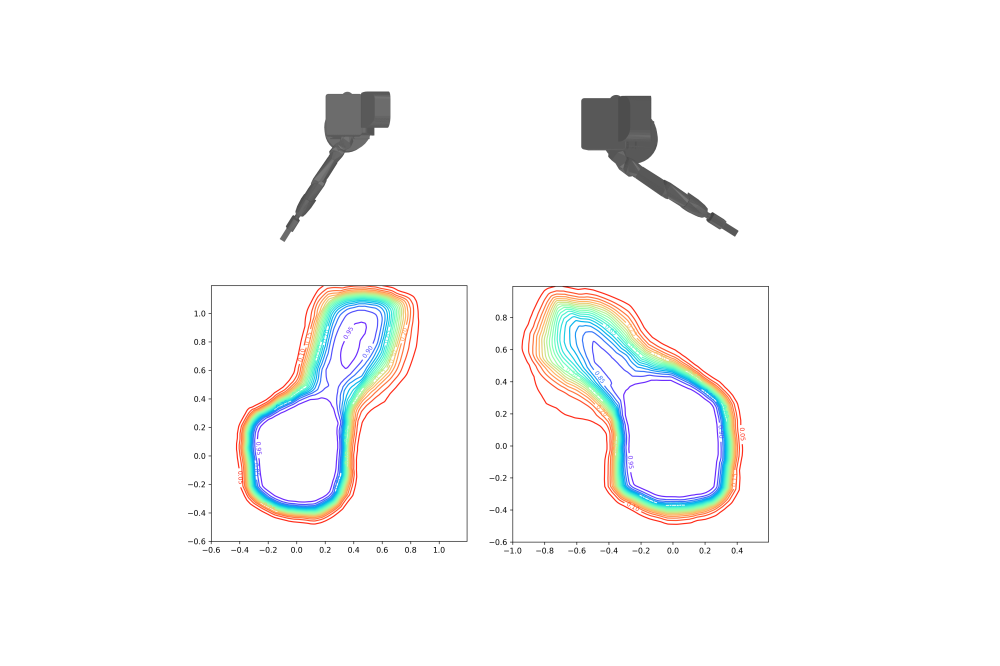
Precise models of the system dynamics are crucial for model-based control and reinforcement learning (RL) in autonomous ...
Deep neural networks (DNNs) have gained extreme popularity in recent years, advancing state-of-the- art results in ...