Bildunterschrift
Figure 1: Overview of our method. The crucial difference to other model-based reinforcement learning methods is the addition of the mutual information (MI) term that encourages information seeking behavior.
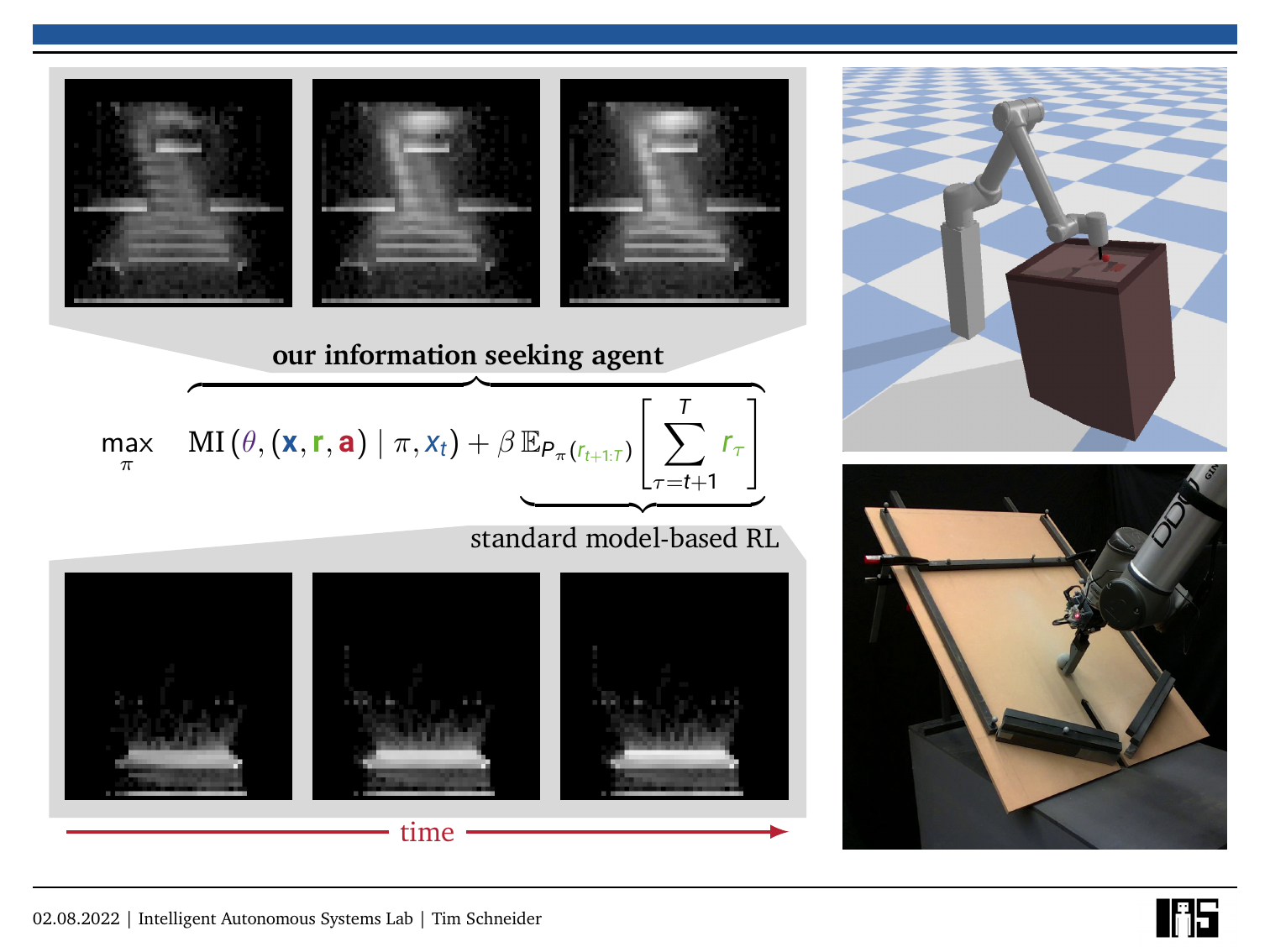
Figure 1: Overview of our method. The crucial difference to other model-based reinforcement learning methods is the addition of the mutual information (MI) term that encourages information seeking behavior.