Bildunterschrift
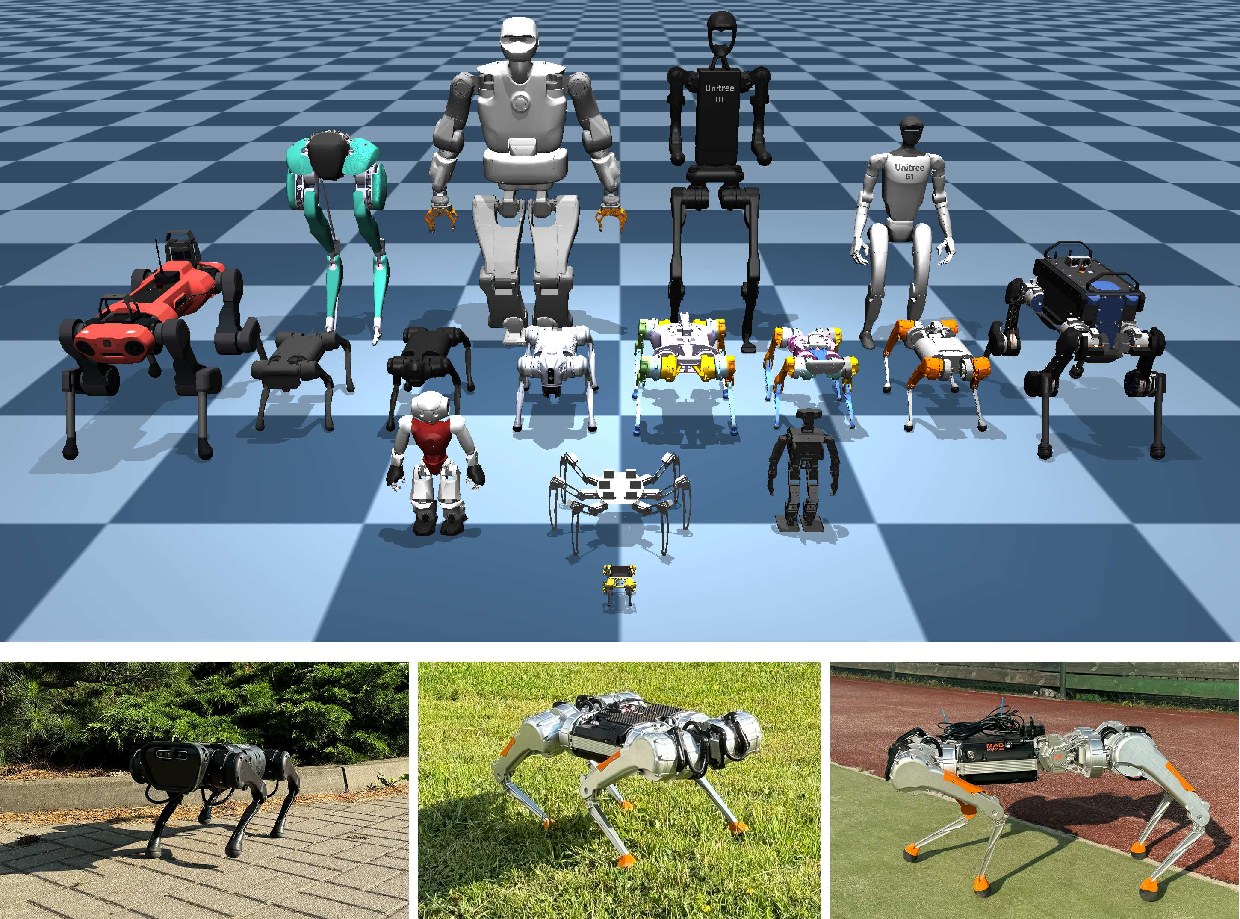
Figure 1: Top – We train a single locomotion policy for multiple robot embodiments in simulation. Bottom – We can transfer and deploy the policy on three real-world platforms by randomizing the embodiments and environment dynamics during training.