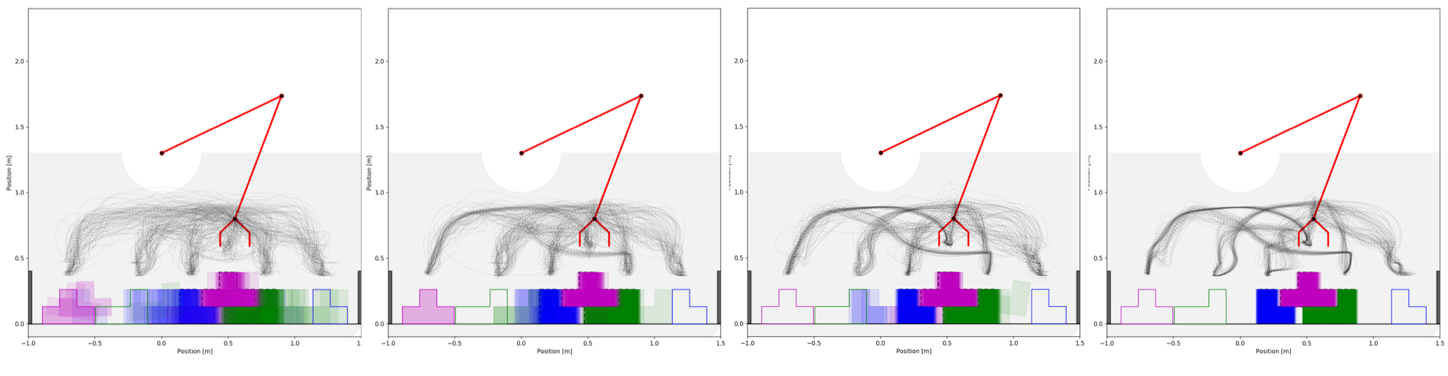
Figure 1:Simulated two degree of freedom robot assembling an object by combining three sequential skills. Each skill is initialized using kinesthetic teaching and refined using reinforcement learning.