Optimization of the Model Parameters and Muscle Excitations of a Human Jaw Model
 Paul-Otto Müller_Optimization of the Model Parameters and Muscle Excitations of a Human Jaw Model_Figure1
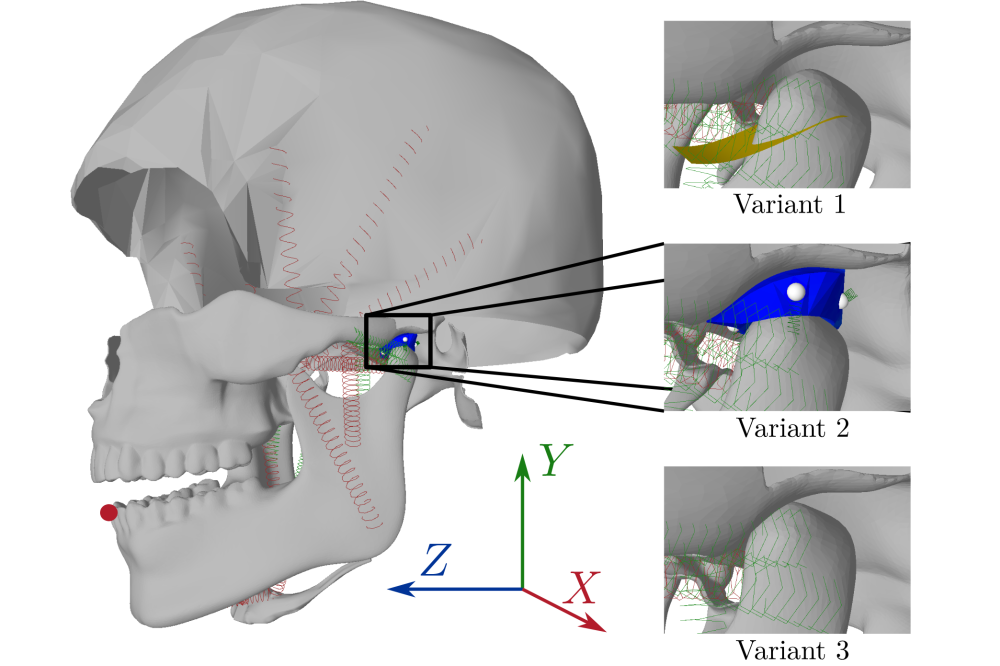
Paul-Otto Müller_Optimization of the Model Parameters and Muscle Excitations of a Human Jaw Model_Figure1Figure 1: Jaw model with bones (grey), 24 muscles (red), 8 ligaments (green), and a differently modeled jaw joint.
Paul-Otto MülleEinleitung
Temporomandibular disorders affect approximately 10 percent of the global population, causing pain, restricted jaw movement, and significant impairments in daily activities such as eating and speaking. While physiotherapy is recognized as an effective first-line treatment, research on assistive technologies like jaw exoskeletons remains in its early stages. Only a handful of studies have explored exoskeletons for jaw rehabilitation, and critically, most lack detailed biomechanical models to guide their design and validate their safety and effectiveness. Developing a jaw exoskeleton requires a sophisticated simulation model of the human masticatory system that can serve as a foundation for prototyping, testing, and analyzing the effects of the device on joints and tissues. However, creating such models presents substantial computational challenges. The jaw is driven by 24 muscles acting on a highly nonlinear system, and determining the muscle excitations that reproduce realistic jaw movements requires solving high-dimensional optimization problems. With only numerical gradients available, global optimization algorithms must explore vast parameter spaces through thousands of function evaluations, each requiring computationally expensive simulations. High-performance computing becomes essential to make such optimization approaches feasible within reasonable timeframes.
Methoden
This project developed an open-source jaw model framework using Project Chrono, a multi-body physics simulation engine. The framework includes three model variants with increasing levels of complexity to serve different purposes. The simplest variant uses rigid body dynamics with point-on-surface constraints that restrict condyle motion to predefined paths, enabling real-time simulation suitable for control applications. The second variant employs natural mesh geometries with contact constraints for more anatomically accurate movements. The third is a hybrid model that combines rigid body dynamics with finite element methods to represent the viscoelastic temporomandibular joint discs, providing detailed insights into joint forces and tissue stresses. All models incorporate 24 muscles with physiologically accurate force-length and force-velocity dependencies, eight ligaments for joint stability, and representations of the mandible, maxilla, hyoid, and cranium. To validate the models, experimental data was collected using optical motion capture systems tracking jaw movements including opening, closing, lateral motions, and chewing. Muscle excitations were computed using PID controllers, with one controller per muscle acting on target muscle lengths. The controller parameters were optimized through a two-stage approach: static optimization generated initial guesses, followed
by global dynamic optimization of 72 parameters using a self-adaptive differential evolution algorithm. The optimization minimized position errors between recorded and simulated movements while penalizing high muscle activations. This computationally intensive process required massive parallelization via OpenMP and extensive use of the Lichtenberg high-performance computer, as each optimization run involved thousands of simulations.
Ergebnisse
The project successfully created an extensible jaw model framework that has been made publicly available as open-source software to encourage collaboration in this emerging research field. The optimization calculations performed on the Lichtenberg cluster enabled tuning of controller parameters that allowed all three model variants to reproduce complex jaw movements from experimental data without prior individualization to the specific participant. The point-on-surface constrained model achieved the best performance with an average position error of 1.97 millimeters across all movements, while the mesh geometry model achieved 3.52 millimeters and the hybrid finite element model 6.35 millimeters. These results are equal to or better than similar approaches reported in the literature. The basic rigid body model demonstrated real-time capability, making it suitable for control applications and rapid prototyping of exoskeleton designs. The hybrid model, while computationally more expensive running approximately 2000 times slower than real-time, provides valuable insights for estimating how an exoskeleton might affect the masticatory system and joint loads. The framework allows easy customization through configuration files, reducing the programming expertise required to adapt models for different applications.
Diskussion
This project establishes a foundation for developing jaw exoskeletons aimed at rehabilitating temporomandibular disorders, addressing a significant gap in the scientific literature where existing exoskeleton studies rarely incorporate detailed biomechanical models. The multi-level framework provides researchers with appropriate tools for different stages of development: basic models enable fast motion analysis, controller design, and integrity checks during rapid prototyping, while the detailed hybrid model allows for assessing potential effects on the masticatory system before human trials. The opensource nature of the framework encourages collaborative progress by providing a shared foundation, which is particularly valuable in this early-stage research field. Future work will focus on individualizing models to specific patients using medical imaging data for more accurate predictions, incorporating additional anatomical details such as cartilage and joint capsules, evaluating the framework with larger participant cohorts, and developing integrated tools for exoskeleton control and design. The high-performance computing resources of the Lichtenberg cluster were essential for the feasibility of the global optimization approach employed in this project. Without access to parallel computing capabilities, the optimization of controller parameters across multiple model variants and movement types would have been impractical, potentially requiring months rather than days of computation time.